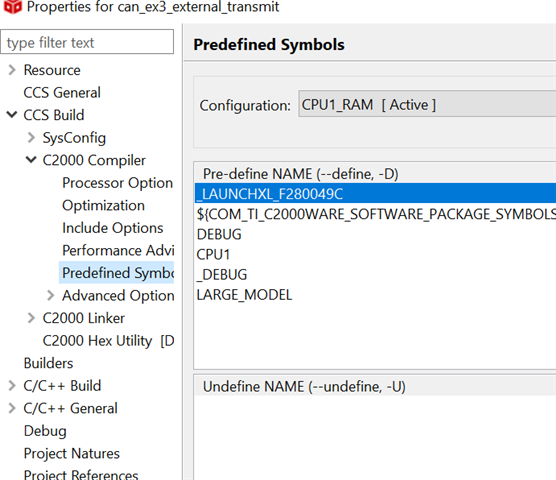
Other Parts Discussed in Thread: LAUNCHXL-F280049C
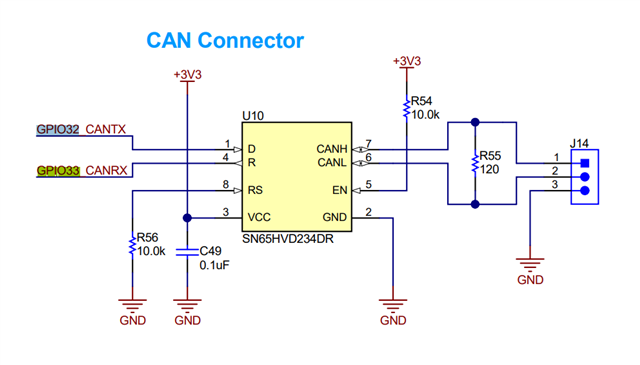
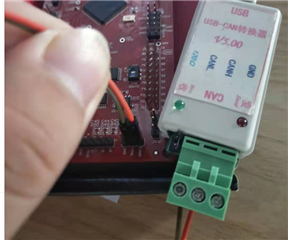
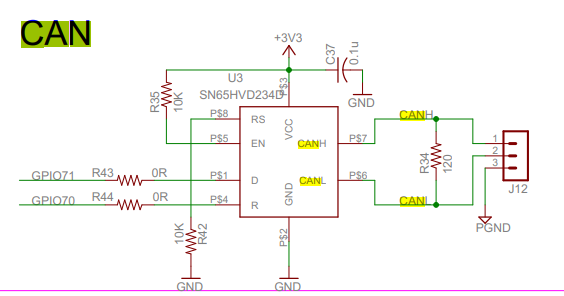
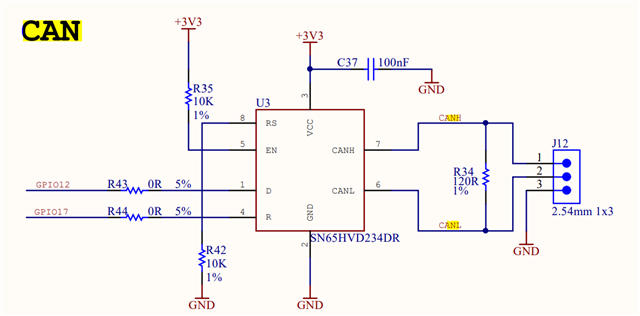
1、我使用LAUNCHXL-F280049C与USBCAN进行连接,我使用的USBCAN的CANL与28004的CANL相连接,USBCAN的CANH与28004的CANH相连接。这种接法是否是对的?
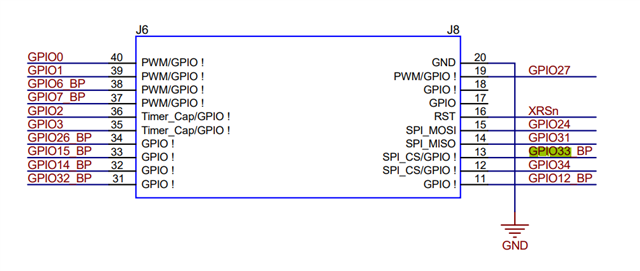
2、我查看芯片手册LAUNCHXL-F280049C的CANA的gpio引脚是:CANA的TX是GPIO32=51引脚,RX是GPIO33=73引脚,我是该用gpio还是CANL和CANH?
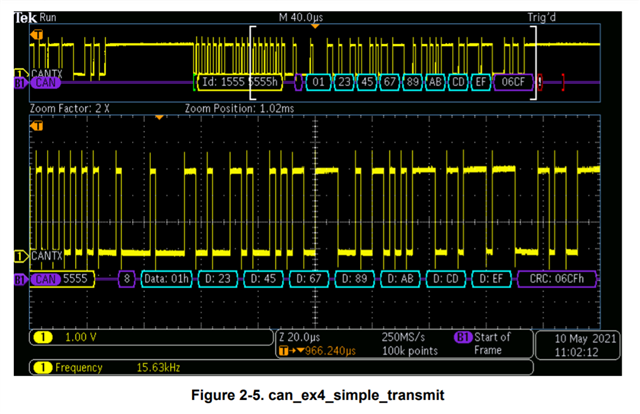
3、我使用的LAUNCHXL-F280049C的发送程序can_ex4_simple_transmit,是不是可以通过示波器看到输出波形?现在没有波形是不是不对?如果不对是什么地方出现了问题呢?
我的示波器应该接什么地方能够采集到波形,是CANL和CANH?还是接GPIO?还是怎么接可以给一个结论么?
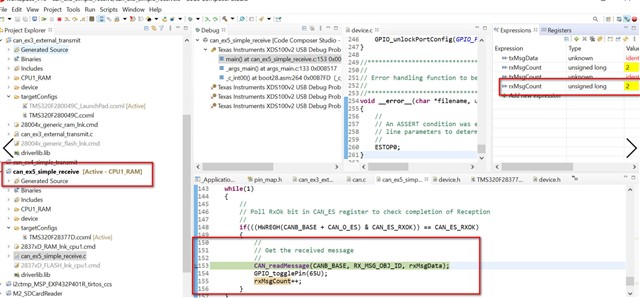
4、使用can_ex4_simple_transmit发送数据卡在 while(((HWREGH(CANA_BASE + CAN_O_ES) & CAN_ES_TXOK)) != CAN_ES_TXOK),是没有接收么?我之前问过这个问题你们回复是没有接收,但是我接的USBCAN和示波器都采集不到你们的信号。我用USBCAN发送信号示波器是可以采集到的,麻烦给我解决一下吧这个问题已经纠结了几天了。反复的问也没得到较好的解决。
辛苦了!