Part Number: TMS320F28388D
我使用的是官方例程:ipc_ex2_msgqueue_c28x1.c和ipc_ex2_msgqueue_cm.c,在此基础上进行修改:
CPU1:
//
// Included Files
//
#include "driverlib.h"
#include "device.h"
#include "stdio.h"
#include "string.h"
#include "stdlib.h"
//
// Defines
//
#define IPC_CMD_READ_MEM 0x1001
#define IPC_CMD_RESP 0x2001
#define TEST_PASS 0x5555
#define TEST_FAIL 0xAAAA
#define DATA_SUM 10
#pragma DATA_SECTION(cpu1_sendData, "MSGRAM_CPU_TO_CM")
uint32_t cpu1_readData[DATA_SUM];
uint32_t cpu1_sendData[DATA_SUM];
uint32_t pass;
IPC_MessageQueue_t messageQueue0;
IPC_Message_t TxMsg0, RxMsg0;
IPC_MessageQueue_t messageQueue1;
IPC_Message_t TxMsg1, RxMsg1;
//
//
//
__interrupt void IPC_ISR0()
{
int i;
bool status = false;
//
// Read the message from the message queue
//
IPC_readMessageFromQueue(IPC_CPU1_L_CM_R, &messageQueue0, IPC_ADDR_CORRECTION_ENABLE,
&RxMsg0, IPC_NONBLOCKING_CALL);
if(RxMsg0.command == IPC_CMD_READ_MEM)
{
status = true;
//
// Read and compare data
//
for(i=0; i<RxMsg0.dataw1; i++)
{
if(i < DATA_SUM)
{
cpu1_readData[i] = *((uint32_t *)RxMsg0.address + i);
}
if(*((uint32_t *)RxMsg0.address + i) != i)
status = false;
}
}
//
// Send response message
//
TxMsg0.command = IPC_CMD_RESP;
TxMsg0.address = 0; // Not used
TxMsg0.dataw1 = status ? TEST_PASS : TEST_FAIL;
TxMsg0.dataw2 = RxMsg0.dataw2; // Use the message identifier from the received message
IPC_sendMessageToQueue(IPC_CPU1_L_CM_R, &messageQueue0, IPC_ADDR_CORRECTION_DISABLE,
&TxMsg0, IPC_NONBLOCKING_CALL);
//
// Acknowledge the flag
//
IPC_ackFlagRtoL(IPC_CPU1_L_CM_R, IPC_FLAG0);
//
// Acknowledge the PIE interrupt.
//
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP11);
}
//
// Main
//
void main(void)
{
int i;
//
// Initialize device clock and peripherals
//
Device_init();
//
// Boot CM core
//
#ifdef _FLASH
Device_bootCM(BOOTMODE_BOOT_TO_FLASH_SECTOR0);
#else
Device_bootCM(BOOTMODE_BOOT_TO_S0RAM);
#endif
//
// Initialize PIE and clear PIE registers. Disables CPU interrupts.
//
Interrupt_initModule();
//
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
//
Interrupt_initVectorTable();
//
// Clear any IPC flags if set already
//
IPC_clearFlagLtoR(IPC_CPU1_L_CM_R, IPC_FLAG_ALL);
/*******************************************cpu1 send cm read******************************************************************/
//
// Initialize message queue
//
IPC_initMessageQueue(IPC_CPU1_L_CM_R, &messageQueue1, IPC_INT1, IPC_INT1);
/*******************************************cpu1 read cm send******************************************************************/
//
// Enable IPC interrupts
//
IPC_registerInterrupt(IPC_CPU1_L_CM_R, IPC_INT0, IPC_ISR0);
//
// Initialize message queue
//
IPC_initMessageQueue(IPC_CPU1_L_CM_R, &messageQueue0, IPC_INT0, IPC_INT0);
//
// Synchronize both the cores
//
IPC_sync(IPC_CPU1_L_CM_R, IPC_FLAG31);
//
// Enable Global Interrupt (INTM) and realtime interrupt (DBGM)
//
EINT;
ERTM;
memset(cpu1_readData,0,sizeof(cpu1_readData));
memset(cpu1_sendData,0,sizeof(cpu1_sendData));
//
// End of example. Loop forever
//
while(1);
{
//
// Fill in the data to be sent
//
for(i=0; i<DATA_SUM; i++)
{
cpu1_sendData[i] = 0x5a5a1234 + 2 * i;
}
//
// Update the message
//
TxMsg1.command = IPC_CMD_READ_MEM;
TxMsg1.address = (uint32_t)cpu1_sendData;
TxMsg1.dataw1 = DATA_SUM; // Using dataw1 as data length
TxMsg1.dataw2 = 1; // Message identifier
//
// Send message to the queue
// Since C28x and CM does not share the same address space for shared RAM,
// ADDRESS_CORRECTION is enabled
//
IPC_sendMessageToQueue(IPC_CPU1_L_CM_R, &messageQueue1, IPC_ADDR_CORRECTION_ENABLE,
&TxMsg1, IPC_BLOCKING_CALL);
//
// Read message from the queue
// Return message from CM does not use the address field, hence
// ADDRESS_COREECTION feature is not used
//
IPC_readMessageFromQueue(IPC_CPU1_L_CM_R, &messageQueue1, IPC_ADDR_CORRECTION_DISABLE,
&RxMsg1, IPC_BLOCKING_CALL);
if((RxMsg1.command == IPC_CMD_RESP) && (RxMsg1.dataw1 == TEST_PASS) && (RxMsg1.dataw2 == 1))
pass = 1;
else
pass = 0;
}
}
CM:
//
// Included Files
//
#include "cm.h"
#include "ipc.h"
//
// Defines
//
#define IPC_CMD_READ_MEM 0x1001
#define IPC_CMD_RESP 0x2001
#define TEST_PASS 0x5555
#define TEST_FAIL 0xAAAA
#define DATA_SUM 10
uint32_t cm_readData[DATA_SUM];
uint32_t cm_sendData[DATA_SUM];
uint32_t pass;
IPC_MessageQueue_t messageQueue0;
IPC_Message_t TxMsg0, RxMsg0;
IPC_MessageQueue_t messageQueue1;
IPC_Message_t TxMsg1, RxMsg1;
//
// IPC ISR for Flag 1
// C28x core sends data with message queue using Flag 0
//
__interrupt void IPC_ISR1()
{
int i;
bool status = false;
//
// Read the message from the message queue
//
IPC_readMessageFromQueue(IPC_CM_L_CPU1_R, &messageQueue1, IPC_ADDR_CORRECTION_ENABLE,
&RxMsg1, IPC_NONBLOCKING_CALL);
if(RxMsg1.command == IPC_CMD_READ_MEM)
{
status = true;
//
// Read and compare data
//
for(i=0; i<RxMsg1.dataw1; i++)
{
if(i < DATA_SUM)
{
cm_readData[i] = *((uint32_t *)RxMsg1.address + i);
}
if(*((uint32_t *)RxMsg1.address + i) != i)
status = false;
}
}
//
// Send response message
//
TxMsg1.command = IPC_CMD_RESP;
TxMsg1.address = 0; // Not used
TxMsg1.dataw1 = status ? TEST_PASS : TEST_FAIL;
TxMsg1.dataw2 = RxMsg1.dataw2; // Use the message identifier from the received message
IPC_sendMessageToQueue(IPC_CM_L_CPU1_R, &messageQueue1, IPC_ADDR_CORRECTION_DISABLE,
&TxMsg1, IPC_NONBLOCKING_CALL);
//
// Acknowledge the flag
//
IPC_ackFlagRtoL(IPC_CM_L_CPU1_R, IPC_FLAG1);
}
//
// Main
//
void main(void)
{
uint32_t i = 0;
//
// Initialize device clock and peripherals
//
CM_init();
//
// Clear any IPC flags if set already
//
IPC_clearFlagLtoR(IPC_CM_L_CPU1_R, IPC_FLAG_ALL);
/*******************************************cpu1 send cm read******************************************************************/
//
// Enable IPC interrupts
//
IPC_registerInterrupt(IPC_CM_L_CPU1_R, IPC_INT1, IPC_ISR1);
//
// Initialize message queue
//
IPC_initMessageQueue(IPC_CM_L_CPU1_R, &messageQueue1, IPC_INT1, IPC_INT1);
/*******************************************cpu1 read cm send******************************************************************/
//
// Initialize message queue
//
IPC_initMessageQueue(IPC_CM_L_CPU1_R, &messageQueue0, IPC_INT0, IPC_INT0);
//
// Synchronize both the cores.
//
IPC_sync(IPC_CM_L_CPU1_R, IPC_FLAG31);
//
// Loop forever. Wait for IPC interrupt
//
while(1)
{
//
// Fill in the data to be sent
//
for(i=0; i<DATA_SUM; i++)
{
cm_sendData[i] = 0x5a5a1234 + 2 * i;
}
//
// Update the message
//
TxMsg0.command = IPC_CMD_READ_MEM;
TxMsg0.address = (uint32_t)cm_sendData;
TxMsg0.dataw1 = DATA_SUM; // Using dataw1 as data length
TxMsg0.dataw2 = 1; // Message identifier
//
// Send message to the queue
// Since C28x and CM does not share the same address space for shared RAM,
// ADDRESS_CORRECTION is enabled
//
IPC_sendMessageToQueue(IPC_CM_L_CPU1_R, &messageQueue0, IPC_ADDR_CORRECTION_ENABLE,
&TxMsg0, IPC_BLOCKING_CALL);
//
// Read message from the queue
// Return message from CM does not use the address field, hence
// ADDRESS_COREECTION feature is not used
//
IPC_readMessageFromQueue(IPC_CM_L_CPU1_R, &messageQueue0, IPC_ADDR_CORRECTION_DISABLE,
&RxMsg0, IPC_BLOCKING_CALL);
if((RxMsg0.command == IPC_CMD_RESP) && (RxMsg0.dataw1 == TEST_PASS) && (RxMsg0.dataw2 == 1))
pass = 1;
else
pass = 0;
}
}
//
// End of File
//
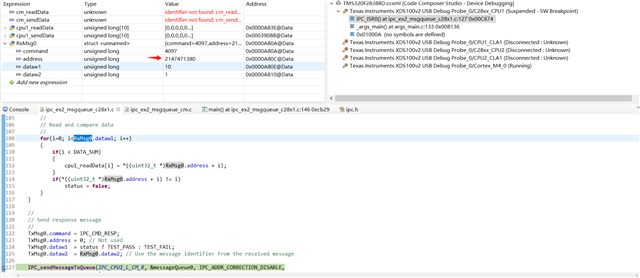
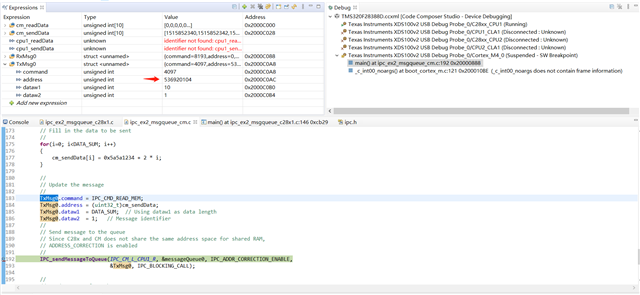
调试: