Part Number: TMS320F28377D
Other Parts Discussed in Thread: C2000WARE
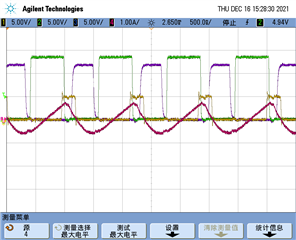
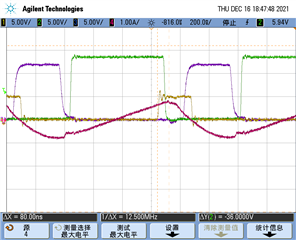
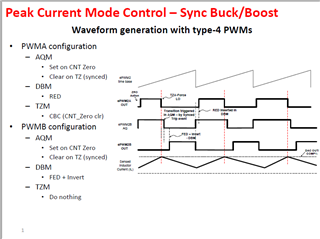
按照下图3进行配置,下面是我电路的实际波形,绿色是PWM1A的驱动,紫色是PWM1B的驱动,黄色是引出的CTRIPOUT信号,现在有个问题 ,PWM1A是设置的TZA.FORCE LOW 动作,但是可以看到CTRIP信号到来时,经过了一定时间的延时,PWM1A才关断,延时时间好像跟我设置的DBRED(80ns)差不多,但是理论上TZA不经过DB的呀,不该有这个延时呀。