

Other Parts Discussed in Thread: C2000WARE,
HI,TI的工程师
我简单修改组合了TI的例程
C:\ti\C2000Ware_4_00_00_00\device_support\f2837xd\examples\cpu1\adc_soc_continuous
和
C:\ti\C2000Ware_4_00_00_00\device_support\f2837xd\examples\cpu1\epwm_up_aq,
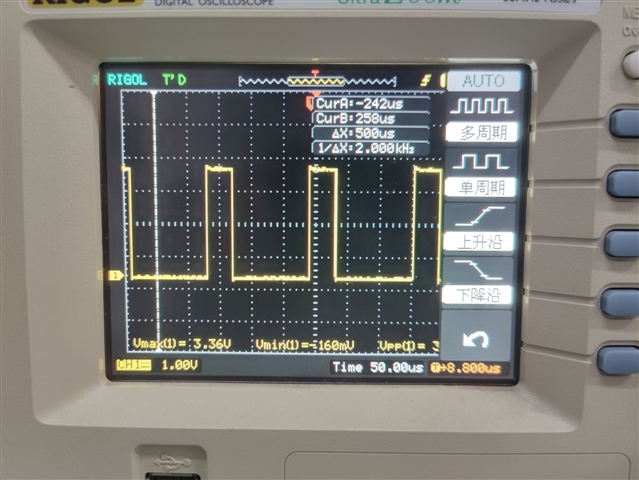
将PWM1A(launchpad标号40)连接到ADCINA0(launchpad标号30),测试LAUNCHXL-F28379D的ADC读取ePWM外设发出的信号,但watch窗口显示AdcaResult0值始终为0

示波器测试ePWM输出波形正常
以下是我的代码,编译运行均无报错
//
// Included Files
//
#include "F28x_Project.h"
//
// Defines
//
#define EPWM1_TIMER_TBPRD 2000 // Period register
#define EPWM1_MIN_CMPA 500
//
// Globals
//
typedef struct
{
volatile struct EPWM_REGS *EPwmRegHandle;
Uint16 EPwmMinCMPA;
}EPWM_INFO;
EPWM_INFO epwm1_info;
Uint16 AdcaResult0;
//
// Function Prototypes
//
void InitEPwm1Example(void);
void ConfigureADC(void);
void SetupADCSoftware(void);
//
// Main
//
void main(void)
{
//
// Step 1. Initialize System Control:
// PLL, WatchDog, enable Peripheral Clocks
// This example function is found in the F2837xD_SysCtrl.c file.
//
InitSysCtrl();
//
// Step 2. Initialize GPIO:
// This example function is found in the F2837xD_Gpio.c file and
// illustrates how to set the GPIO to it's default state.
//
InitGpio();
//
// Enable PWM1, PWM2 and PWM3
//
CpuSysRegs.PCLKCR2.bit.EPWM1=1;
//
// For this case just init GPIO pins for ePWM1, ePWM2, ePWM3
// These functions are in the F2837xD_EPwm.c file
//
InitEPwm1Gpio();
//
// Step 3. Clear all interrupts and initialize PIE vector table:
// Disable CPU interrupts
//
DINT;
//
// Initialize the PIE control registers to their default state.
// The default state is all PIE interrupts disabled and flags
// are cleared.
// This function is found in the F2837xD_PieCtrl.c file.
//
InitPieCtrl();
//
// Disable CPU interrupts and clear all CPU interrupt flags:
//
IER = 0x0000;
IFR = 0x0000;
//
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
// This will populate the entire table, even if the interrupt
// is not used in this example. This is useful for debug purposes.
// The shell ISR routines are found in F2837xD_DefaultIsr.c.
// This function is found in F2837xD_PieVect.c.
//
InitPieVectTable();
//
// For this example, only initialize the ePWM
//
EALLOW;
CpuSysRegs.PCLKCR0.bit.TBCLKSYNC = 0;
EDIS;
InitEPwm1Example();
EALLOW;
CpuSysRegs.PCLKCR0.bit.TBCLKSYNC = 1;
EDIS;
//
// Step 4. User specific code, enable interrupts:
//
// Enable CPU INT3 which is connected to EPWM1-3 INT:
//
IER |= M_INT3;
//
// Enable EPWM INTn in the PIE: Group 3 interrupt 1-3
//
PieCtrlRegs.PIEIER3.bit.INTx1 = 1;
//
// Enable global Interrupts and higher priority real-time debug events:
//
EINT; // Enable Global interrupt INTM
ERTM; // Enable Global realtime interrupt DBGM
//
//Configure the ADCs and power them up
//
ConfigureADC();
//
//Setup the ADCs for software conversions
//
SetupADCSoftware();
//
//take conversions indefinitely in loop
//
do
{
//
//convert, wait for completion, and store results
//start conversions immediately via software, ADCA
//
AdcaRegs.ADCSOCFRC1.all = 0x0001; //SOC0
//
//wait for ADCA to complete, then acknowledge flag
//
while(AdcaRegs.ADCINTFLG.bit.ADCINT1 == 0);
AdcaRegs.ADCINTFLGCLR.bit.ADCINT1 = 1;
//
//store results
//
AdcaResult0 = AdcaResultRegs.ADCRESULT0;
//
//at this point, conversion results are stored in
//AdcaResult0, AdcaResult1, AdcbResult0, and AdcbResult1
//
//
//software breakpoint, hit run again to get updated conversions
//
asm(" ESTOP0");
}while(1);
}
//
// InitEPwm1Example - Initialize EPWM1 values
//
void InitEPwm1Example()
{
//
// Setup TBCLK
//
EPwm1Regs.TBCTL.bit.CTRMODE = TB_COUNT_UP; // Count up
EPwm1Regs.TBPRD = EPWM1_TIMER_TBPRD; // Set timer period
EPwm1Regs.TBCTL.bit.PHSEN = TB_DISABLE; // Disable phase loading
EPwm1Regs.TBPHS.bit.TBPHS = 0x0000; // Phase is 0
EPwm1Regs.TBCTR = 0x0000; // Clear counter
EPwm1Regs.TBCTL.bit.HSPCLKDIV = TB_DIV2; // Clock ratio to SYSCLKOUT
EPwm1Regs.TBCTL.bit.CLKDIV = TB_DIV2;
//
// Setup shadow register load on ZERO
//
EPwm1Regs.CMPCTL.bit.SHDWAMODE = CC_SHADOW;
EPwm1Regs.CMPCTL.bit.LOADAMODE = CC_CTR_ZERO;
//
// Set Compare values
//
EPwm1Regs.CMPA.bit.CMPA = EPWM1_MIN_CMPA; // Set compare A value
//
// Set actions
//
EPwm1Regs.AQCTLA.bit.ZRO = AQ_SET; // Set PWM1A on Zero
EPwm1Regs.AQCTLA.bit.CAU = AQ_CLEAR; // Clear PWM1A on event A,
// up count
}
//
// ConfigureADC - Write ADC configurations and power up the ADC for both
// ADC A and ADC B
//
void ConfigureADC(void)
{
EALLOW;
//
//write configurations
//
AdcaRegs.ADCCTL2.bit.PRESCALE = 6; //set ADCCLK divider to /4
AdcSetMode(ADC_ADCA, ADC_RESOLUTION_12BIT, ADC_SIGNALMODE_SINGLE);
//
//Set pulse positions to late
//
AdcaRegs.ADCCTL1.bit.INTPULSEPOS = 1;
//
//power up the ADCs
//
AdcaRegs.ADCCTL1.bit.ADCPWDNZ = 1;
//
//delay for 1ms to allow ADC time to power up
//
DELAY_US(1000);
EDIS;
}
//
// SetupADCSoftware - Setup ADC channels and acquisition window
//
void SetupADCSoftware(void)
{
Uint16 acqps;
//
//determine minimum acquisition window (in SYSCLKS) based on resolution
//
acqps = 14; //75ns
//
//Select the channels to convert and end of conversion flag
//ADCA
//
EALLOW;
AdcaRegs.ADCSOC0CTL.bit.CHSEL = 0; //SOC0 will convert pin A0
AdcaRegs.ADCSOC0CTL.bit.ACQPS = acqps; //sample window is acqps +
//1 SYSCLK cycles
AdcaRegs.ADCINTSEL1N2.bit.INT1SEL = 1; //end of SOC1 will set INT1 flag
AdcaRegs.ADCINTSEL1N2.bit.INT1E = 1; //enable INT1 flag
AdcaRegs.ADCINTFLGCLR.bit.ADCINT1 = 1; //make sure INT1 flag is cleared
EDIS;
}
//
// End of file
//
请问AdcaResult0无数据是什么原因呢?
谢谢!

