

Part Number: TMS320F28069M
Instaspin提供的官方代码,那个GPIO怎么怎么定义的在,比如HALL信号的GPIO, 我没看到他哪个文件有具体的初始化(定义输入输出管脚,上下拉)等,我现在想在他的工程增加一个GPIO的功能,这个需要如何做?
Original question:

Part Number: TMS320F28069M
Instaspin提供的官方代码,那个GPIO怎么怎么定义的在,比如HALL信号的GPIO, 我没看到他哪个文件有具体的初始化(定义输入输出管脚,上下拉)等,我现在想在他的工程增加一个GPIO的功能,这个需要如何做?


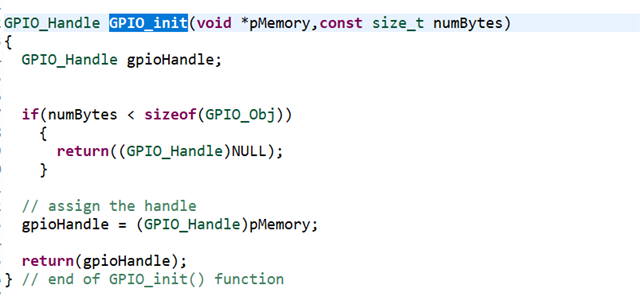 到这 我就不明白了,我有STM32的一定基础,在这我没搞明白他这么一句话 就把 Instaspin 驱动管管脚/HALL管脚等都配置好了对应的 PWM或者GPIO输入。
到这 我就不明白了,我有STM32的一定基础,在这我没搞明白他这么一句话 就把 Instaspin 驱动管管脚/HALL管脚等都配置好了对应的 PWM或者GPIO输入。