

Part Number: TMS320F28388D
运行例程,并且在TwinCAT扫描到设备后,默认的会是CSV模式,也就是Cyclic Synchronous Velocity,即速度控制模式。
按照《EtherCAT_Slave_Controller_User_Guide》文档中的步骤,生成的XML文件F2838x CM EtherCAT Slave中,有3种模式的定义:CSP/CSV(位置控制与速度控制动态切换)、CSP(Cyclic Synchronous Position)以及CSV(Cyclic Synchronous Velocity)。
这里的三种模式,也就是XML文件中的三个模块,可以有两种解释:
第一种是每一个模块对应一个实际的物理单元,类似一个控制板卡,它可以实现一种控制方式,控制板卡可以插在总线槽位(slot)上
第二种是实际上只有一个物理单元,也就是只有一个EtherCAT从站设备,软件上定义了可以支持的CSP/CSV、CSP、CSV三种模式
对于一块28388板卡,显然属于第二种情况。
因此当我们需要由CSP模式切换到CSV模式时,可以这样做:
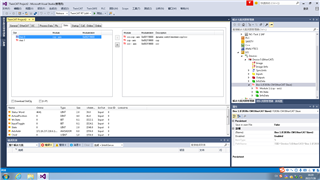
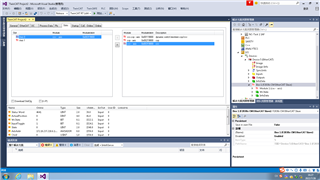
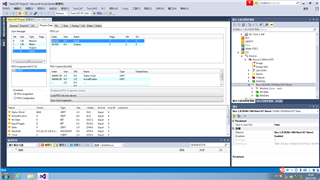
点击BOX1,选择Slots标签页,选择Axis0(当前模式位CSP模式),点击  ,将当前模式删除,在右侧选择CSV模式,在点击“<”,将CSV模式添加到当前轴,如下图所示:
,将当前模式删除,在右侧选择CSV模式,在点击“<”,将CSV模式添加到当前轴,如下图所示:
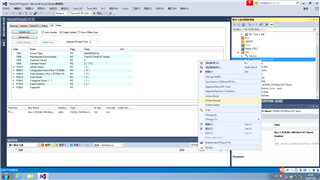
此时,你会发现,TwinCAT的中PDO通道,随着模式切换做了改变,
RxPDO由0x1601切换为0x1602
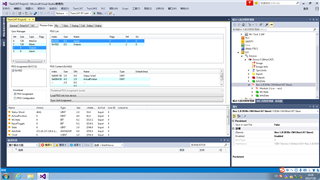
TxPDO由0x1A01切换为0x1A02
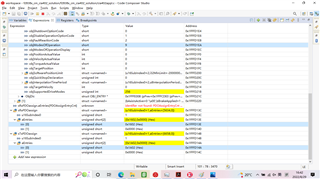
但是,需要注意的是,此时388中的对象并没有变,
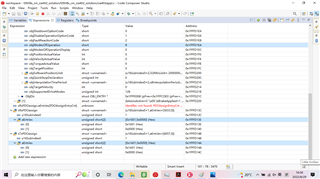
RxPDO绑定的还是对应CSP模式的0x1601
TxPDO绑定的还是对应CSP模式的0x1A01
模式对象的数值是8,为CSP模式
这个时候需要在TwinCAT中重新加载,才能使新设定的CSV模式生效
在EtherCAT外文论坛,找到两个描述以上过程的帖子,大家可以参考一下:


