Part Number: TMS320F280025C
利用两个epwm模块 epwm1A和 epwm2A。epwm1A设置为同步信号输出,epwm2A接收epwm1A的同步信号。当epwm1A的PRD改变时,CMA变为0.1*PRD。epwm2A的PRD跟随epwm1A变化,CMA也是0.1*PRD。而此过程,epwm1A与epwm2A的相对相移需要一直保持恒定。
正常情况如下,这是我需要的波形。注意绿色为1A,黄色为2A,后面的波形都是以此情况。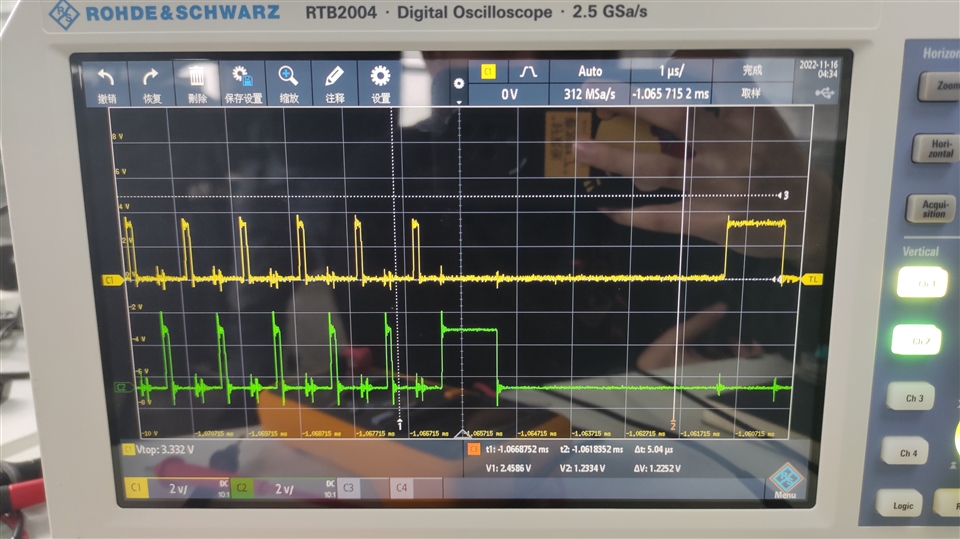
但是在运行过程中,它会周期性出现以下两种波形,这是为什么?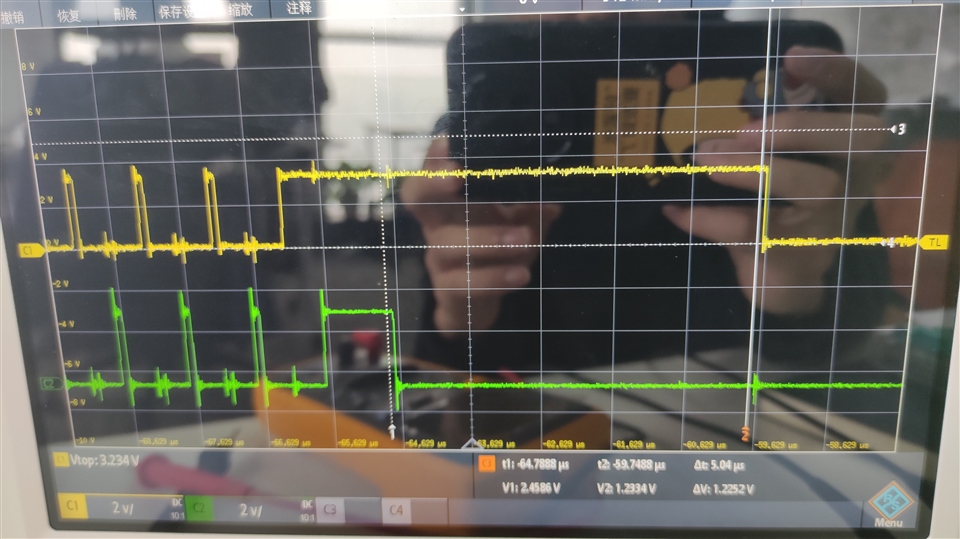
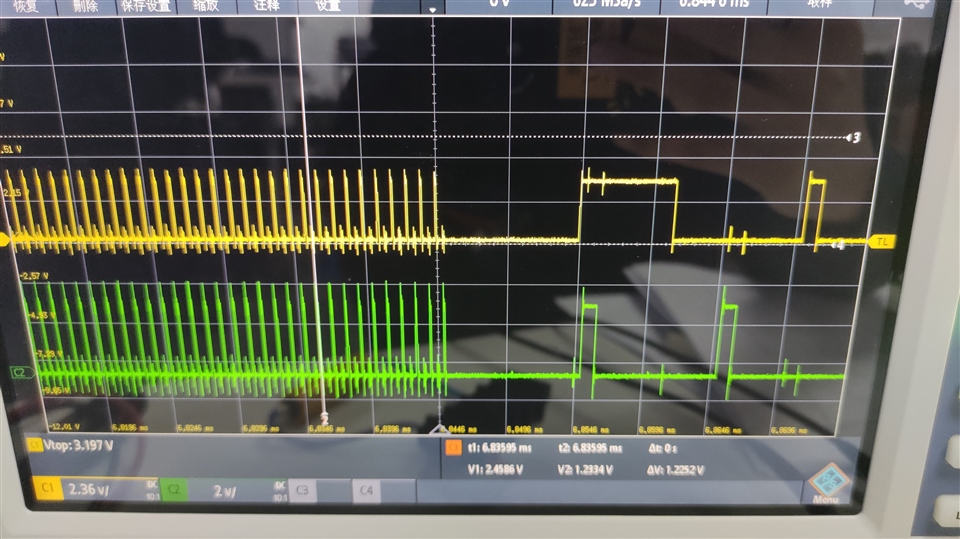
只有当我的PRD由小变大的时候才出现,而PRD由大变小一切正常。如下图。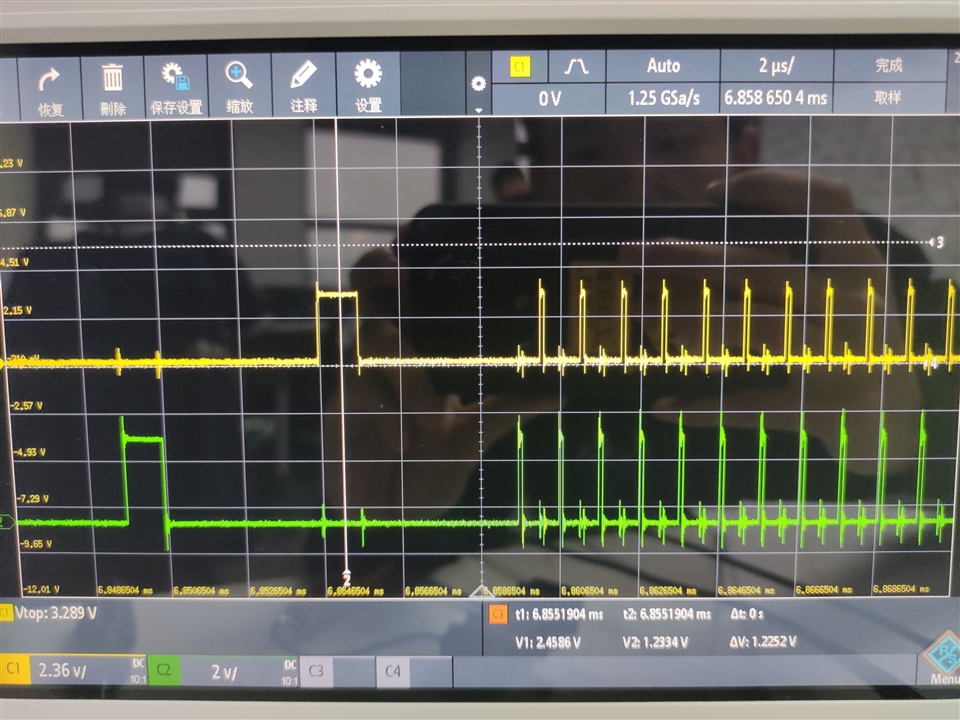
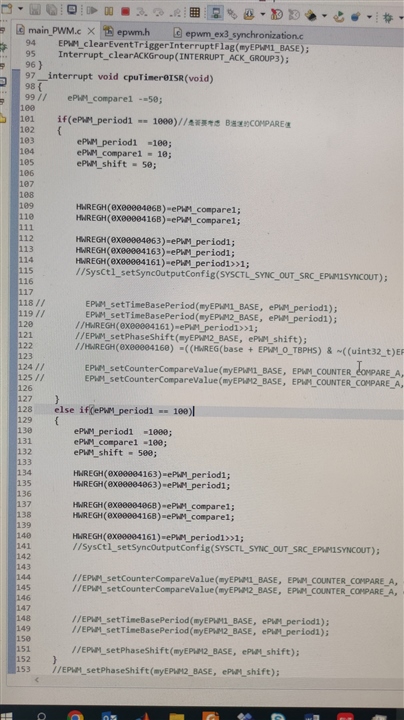
代码配置如下
初始化PWM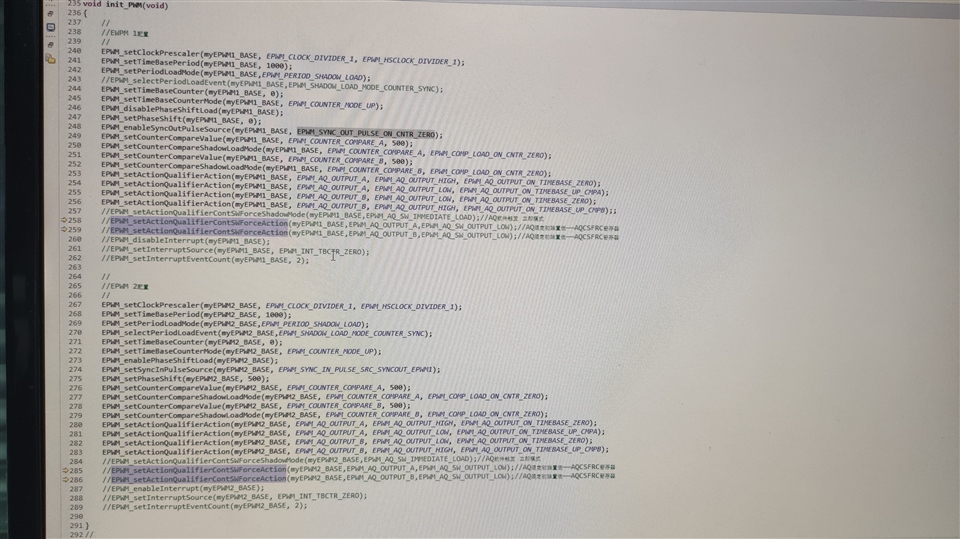
改变PRD,CMA,PHS代码如下