

写了一个PWM周期触发ADC转换,然后进入ADC中断的程序,发现在FLASH和RAM中运行的时序差异很大,
下载到FLASH中 运行完全不能满足需求,请教一下TI的工程师,如何解决:
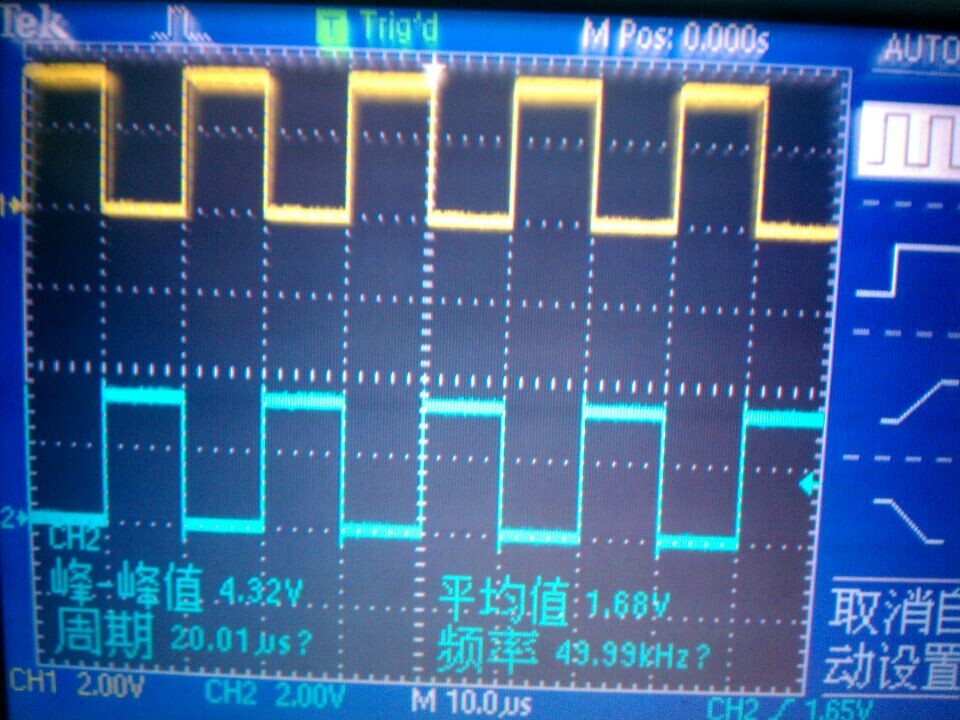
1、在RAM中调试的PWM波形(使用28335_RAM_lnk.cmd):
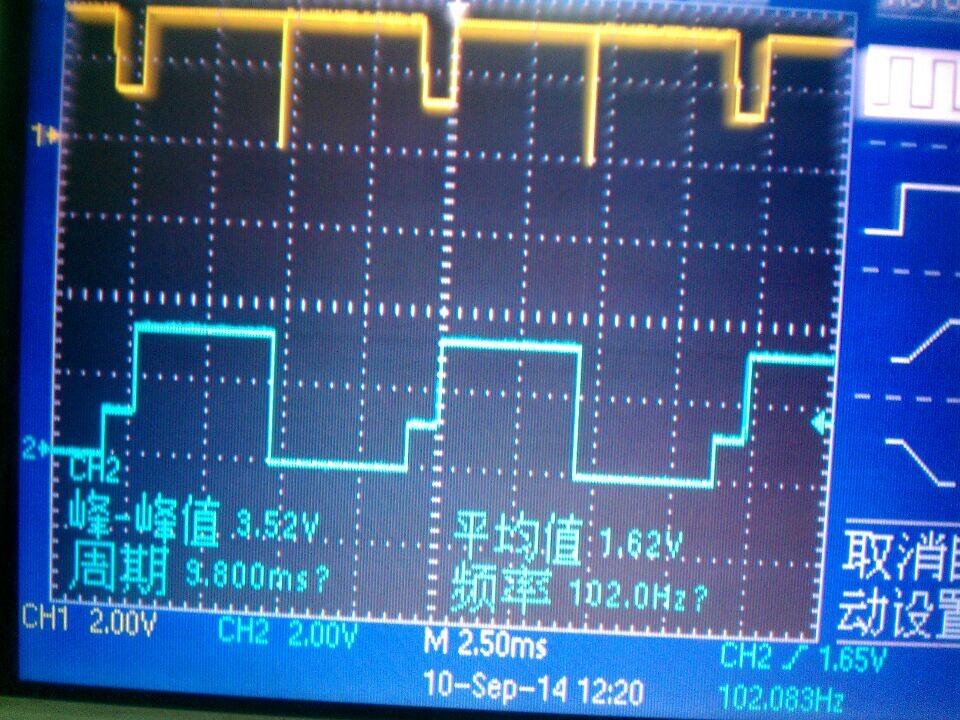
2、使用FLASH调试(F28335.cmd)
PWM频率设置的是50khz,50%占空比
不但时序发生了很大的变化,PWM波形也有很大偏差,请问这究竟如何解决?
写了一个PWM周期触发ADC转换,然后进入ADC中断的程序,发现在FLASH和RAM中运行的时序差异很大,
下载到FLASH中 运行完全不能满足需求,请教一下TI的工程师,如何解决:
1、在RAM中调试的PWM波形(使用28335_RAM_lnk.cmd):
2、使用FLASH调试(F28335.cmd)
PWM频率设置的是50khz,50%占空比
不但时序发生了很大的变化,PWM波形也有很大偏差,请问这究竟如何解决?
