Part Number: TMS320F280049C
Other Parts Discussed in Thread: LAUNCHXL-F280049C
HI,
我用的开发板是LAUNCHXL-F280049C 。开发自己的CAN bootloader程序。我的主程序和BOOT程序写在同一个工程文件中。
我的上位机程序在烧写传送.out文件完毕后,如果不断电,可以从BOOT跳转到主程序APP,因为可以看到CAN通信重新读取数据到我的上位机;
但是如果断电,从新上电,主程序没有运行,直接证据是不可以看到CAN通信读取数据到我的上位机。
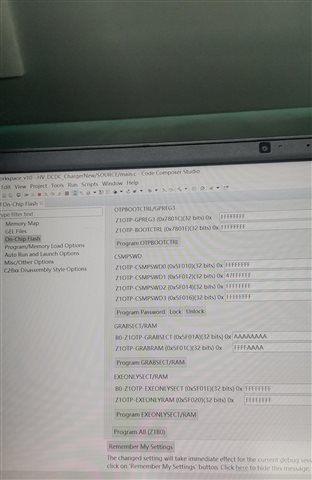
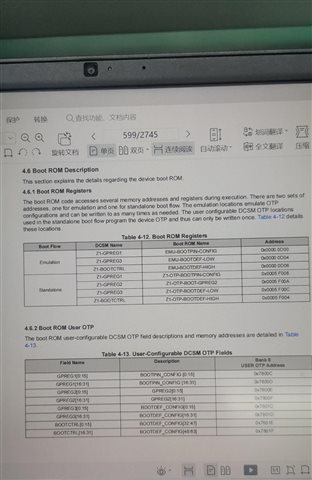
然后我在没有檫除FLASH情况, 用CCS查看程序BOOTROM哪里出问题了。
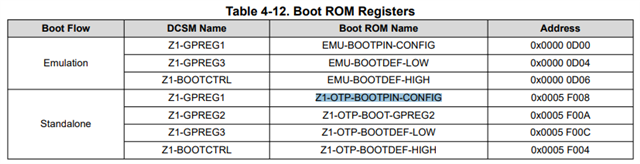
1)首先我用CCS10.0加载调试程序时,点击ccs菜单''CPU RESER",程序进入0x3fc7a5,然后运行,程序停止在BOOTROM中的一段''WAIT-BOOT"中。
2)后来我修改了0Xd00寄存器数据为0x5AFF FFFF,程序可以进入主程序。但是开发板断电后0xD00数据又恢复成一个0X8F3F 3BDE之类的数据。
这说明我用自己的上位机进行CAN下载后不知道改动了哪里,BOOTROM不能正常读取0XD00数据导致程序下电后再上电,主程序启动失败。
3)如果我用CCS DEBUG下载.out文件到280049开发板,开发板断电后再上电,主程序启动正常(因为可以看到CAN通信读取数据到我的上位机)。
我目前只能查到这里,希望给些建议,再怎么进行下一步操作。多谢