Part Number: TMS320F28335
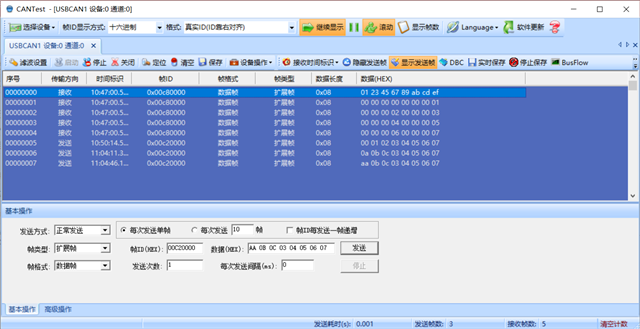
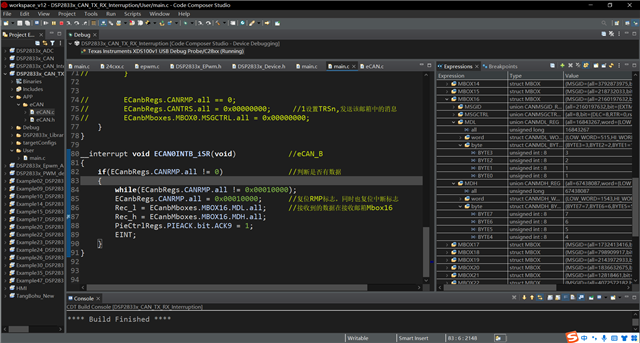
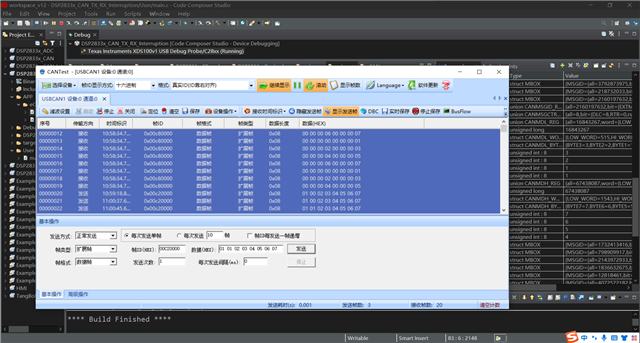
大佬们,我想问一下,做CAN通信,我用0号邮箱做发送邮箱,16号邮箱作为接收邮箱。但我在十六号邮箱中写了个中断。就是使用CAN调试软件,运行程序,可以看到CAN调试软件中0号邮箱发送的数据。但是我在CAN调试软件上给16号邮箱发送数据程序就进入不到中断了。但是16号邮箱里面的数据变化了。而且从CAN调试软件上0号邮箱发送了一帧01,23,45,67,89,ab,cd,ef。这一帧不知道是怎么产生的。但是我如果在主函数将发送的那部分程序注释掉,在那个接收中断打断点,从CAN调试软件上发送数据是可以直接进入到中断里面的。