

Part Number: LAUNCHXL-F28379D
我的开发板是 LaunchXL-F28379D,驱动板是 DEV8301REVB。 通过指南移植了C2000motorcontrol4.0.0 中电机实验室,根据User’s Guide Motor Control SDK Universal Project and Lab 手册进行level1-level4分步调试,
现在在level1构建下是正常的,但是在level2的构建时,占空比会出现一些异常。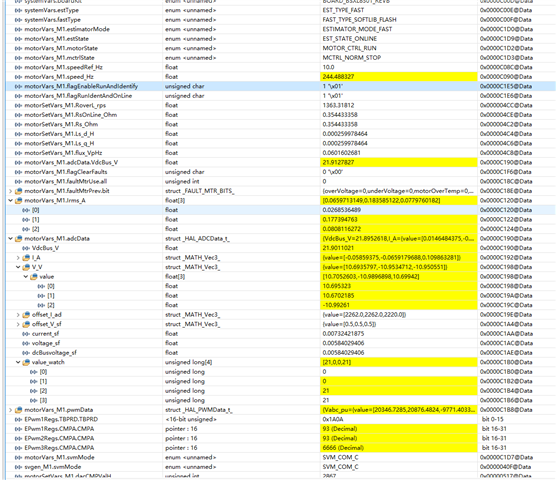 在观察pwmdata几个变量很异常,将会达到几万,或者负几万。
在观察pwmdata几个变量很异常,将会达到几万,或者负几万。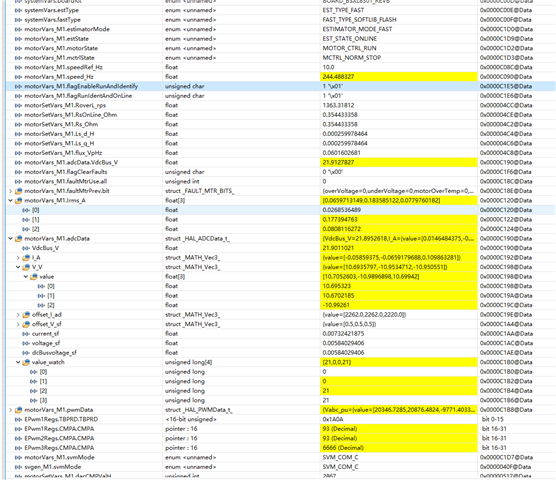

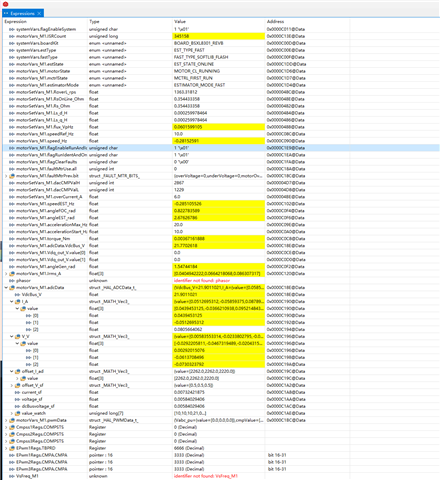
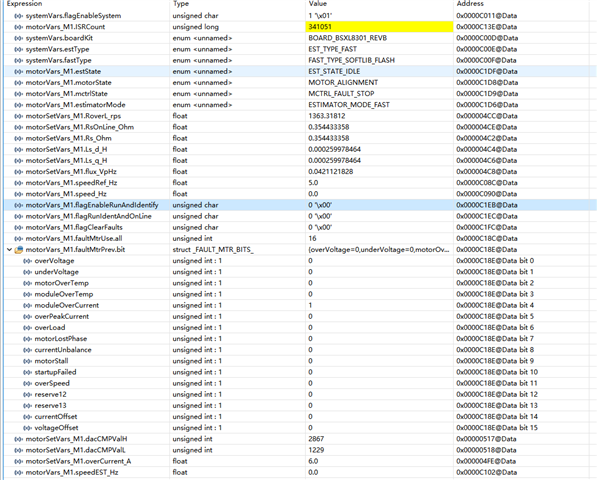
 你好 我发现oneOverDcBus_invV有些异常,为31415.977 请问一下这个值试EST_run 估算出来得吗?在工程中我并没有找到相关程序对其赋值。我将其更改为母线电压的倒数,现在level2电机是可以运行的。 希望尽快回复。谢谢!!!
你好 我发现oneOverDcBus_invV有些异常,为31415.977 请问一下这个值试EST_run 估算出来得吗?在工程中我并没有找到相关程序对其赋值。我将其更改为母线电压的倒数,现在level2电机是可以运行的。 希望尽快回复。谢谢!!!