Part Number: TMS320F28377S
问题描述:。
主从机均为TMS320F28377S,通过CAN通信交互数据,波特率500kHz。
主机每1ms发送一帧数据给从机,长度5个字节。
从机采用中断方式接收主机数据,开始一段时间接收正常,过一段时间后,从机接收不到主机的数据,间隔时间不固定,有时很长时间也没有接收不到的现象。
另:从机接收不到主机数据现象发生后,通过Can工具给从机DSP发送其他帧ID数据,从机还能成功接收。
请问:
该现象是怎么产生的?应该如何解决呢?
Part Number: TMS320F28377S
问题描述:。
主从机均为TMS320F28377S,通过CAN通信交互数据,波特率500kHz。
主机每1ms发送一帧数据给从机,长度5个字节。
从机采用中断方式接收主机数据,开始一段时间接收正常,过一段时间后,从机接收不到主机的数据,间隔时间不固定,有时很长时间也没有接收不到的现象。
另:从机接收不到主机数据现象发生后,通过Can工具给从机DSP发送其他帧ID数据,从机还能成功接收。
请问:
该现象是怎么产生的?应该如何解决呢?


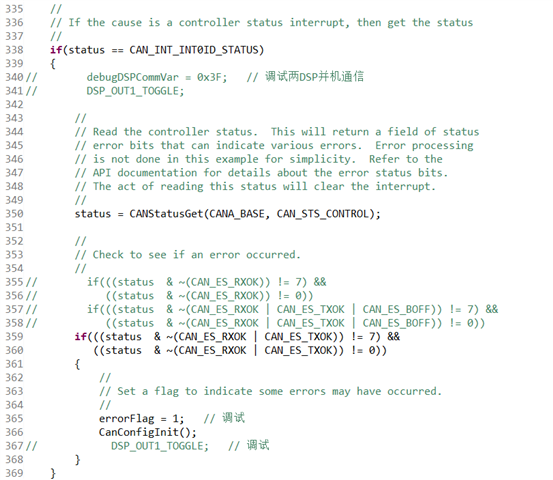 从机接收不到主机的数据时,从机程序也没进入上面CAN通信错误中断中。会是因为我程序还有个1ms中断,把CAN接收中断影响了吗?
从机接收不到主机的数据时,从机程序也没进入上面CAN通信错误中断中。会是因为我程序还有个1ms中断,把CAN接收中断影响了吗?