Part Number: TMS320F28377D
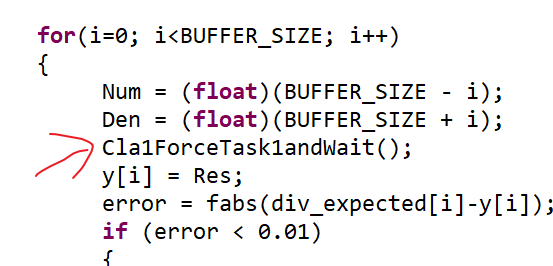
如题,我将官方的配置文件全部复制过来我的工程,但是却无法启动cla,具体现象为:运行到Cla1ForceTask1andWait();时就一直不执行,配置代码为:
//###########################################################################
// FILE: cla_divide_cpu01.c
// TITLE: CLA Divide Example for F2837xS.
//
//! \addtogroup cpu01_example_list
//! <h1>CLA Division: Newton Raphson Approximation (cla_divide_cpu01)</h1>
//!
//! In this example, Task 1 of the CLA will divide two input numbers using
//! multiple approximations in the Newton Raphson method.
//!
//! \b Memory \b Allocation \n
//! - CLA1 to CPU Message RAM
//! - Res - Result of the division operation
//! - CPU to CLA1 Message RAM
//! - Num - Numerator of input
//! - Den - Denominator of input
//!
//! \b Watch \b Variables \n
//! - Num - Numerator of input
//! - Den - Denominator of input
//! - Res - Result of the division operation
//
//###########################################################################
// $TI Release: F2837xS Support Library v190 $
// $Release Date: Mon Feb 1 16:59:09 CST 2016 $
// $Copyright: Copyright (C) 2014-2016 Texas Instruments Incorporated -
// http://www.ti.com/ ALL RIGHTS RESERVED $
//###########################################################################
#include "F28x_Project.h" // Device Headerfile and Examples Include File
#include "cla_divide_shared.h"
//*****************************************************************************
// defines
//*****************************************************************************
//CLA defines
#define WAITSTEP asm(" RPT #255 || NOP")
//*****************************************************************************
// globals
//*****************************************************************************
//Task 1 (C) Variables
// NOTE: Do not initialize the Message RAM variables globally, they will be reset
// during the message ram initialization phase in the CLA memory configuration routine
#ifdef __cplusplus
#pragma DATA_SECTION("CpuToCla1MsgRAM");
float Num;
#pragma DATA_SECTION("CpuToCla1MsgRAM");
float Den;
#pragma DATA_SECTION("Cla1ToCpuMsgRAM");
float Res;
#else
#pragma DATA_SECTION(Num,"CpuToCla1MsgRAM");
float Num;
#pragma DATA_SECTION(Den,"CpuToCla1MsgRAM");
float Den;
#pragma DATA_SECTION(Res,"Cla1ToCpuMsgRAM");
float Res;
#endif //__cplusplus
float y[BUFFER_SIZE];
//Task 2 (C) Variables
//Task 3 (C) Variables
//Task 4 (C) Variables
//Task 5 (C) Variables
//Task 6 (C) Variables
//Task 7 (C) Variables
//Task 8 (C) Variables
//Common (C) Variables
//Golden Test Values
float div_expected[BUFFER_SIZE]={
1, 0.9692308, 0.9393939, 0.9104478, 0.8823529,
0.8550724, 0.8285714, 0.8028169, 0.7777778, 0.7534246,
0.7297297, 0.7066666, 0.6842105, 0.6623377, 0.6410257,
0.6202531, 0.6000000, 0.5802469, 0.5609756, 0.5421687,
0.5238096, 0.5058824, 0.4883721, 0.4712644, 0.4545455,
0.4382023, 0.4222222, 0.4065934, 0.3913043, 0.3763441,
0.3617021, 0.3473684, 0.3333333, 0.3195876, 0.3061225,
0.2929293, 0.2800000, 0.2673267, 0.2549020, 0.2427184,
0.2307692, 0.2190476, 0.2075472, 0.1962617, 0.1851852,
0.1743119, 0.1636364, 0.1531532, 0.1428571, 0.1327434,
0.1228070, 0.1130435, 0.1034483, 0.09401710, 0.08474576,
0.07563026, 0.06666667, 0.05785124, 0.04918033, 0.04065040,
0.03225806, 0.02400000, 0.01587302, 0.007874016
};
uint16_t pass=0;
uint16_t fail=0;
//*****************************************************************************
// function prototypes
//*****************************************************************************
void CLA_runTest(void);
void CLA_configClaMemory(void);
void CLA_initCpu1Cla1(void);
__interrupt void cla1Isr1();
__interrupt void cla1Isr2();
__interrupt void cla1Isr3();
__interrupt void cla1Isr4();
__interrupt void cla1Isr5();
__interrupt void cla1Isr6();
__interrupt void cla1Isr7();
__interrupt void cla1Isr8();
//*****************************************************************************
// Start of main
//*****************************************************************************
void main(void)
{
// Step 1. Initialize System Control:
// PLL, WatchDog, enable Peripheral Clocks
// This example function is found in the F2837xS_SysCtrl.c file.
InitSysCtrl();
// Step 2. Clear all interrupts and initialize PIE vector table:
// Disable CPU interrupts
DINT;
// Initialize the PIE control registers to their default state.
// The default state is all PIE interrupts disabled and flags
// are cleared.
// This function is found in the F2837xS_PieCtrl.c file.
InitPieCtrl();
// Disable CPU interrupts and clear all CPU interrupt flags:
IER = 0x0000;
IFR = 0x0000;
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
// This will populate the entire table, even if the interrupt
// is not used in this example. This is useful for debug purposes.
// The shell ISR routines are found in F2837xS_DefaultIsr.c.
// This function is found in F2837xS_PieVect.c.
InitPieVectTable();
// Step 3. Configure the CLA memory spaces first followed by
// the CLA task vectors
CLA_configClaMemory();
CLA_initCpu1Cla1();
// Step 4. Enable global Interrupts and higher priority real-time debug events:
EINT; // Enable Global interrupt INTM
ERTM; // Enable Global realtime interrupt DBGM
// Step 5. Run the test
CLA_runTest();
}
//*****************************************************************************
// function definitions
//*****************************************************************************
void CLA_runTest(void)
{
int i, error;
for(i=0;i<BUFFER_SIZE;i++)
{
Num = (float)(BUFFER_SIZE - i);
Den = (float)(BUFFER_SIZE + i);
Cla1ForceTask1andWait();
y[i] = Res;
error = fabs(div_expected[i]-y[i]);
if (error < 0.01)
{
pass++;
}
else
{
fail++;
}
}
#if 0
Cla1ForceTask2andWait();
WAITSTEP;
Cla1ForceTask3andWait();
WAITSTEP;
Cla1ForceTask4andWait();
WAITSTEP;
Cla1ForceTask5andWait();
WAITSTEP;
Cla1ForceTask6andWait();
WAITSTEP;
Cla1ForceTask7andWait();
WAITSTEP;
Cla1ForceTask8andWait();
WAITSTEP;
#endif
}
void CLA_configClaMemory(void)
{
extern uint32_t Cla1funcsRunStart, Cla1funcsLoadStart, Cla1funcsLoadSize;
EALLOW;
#ifdef _FLASH
// Copy over code from FLASH to RAM
memcpy((uint32_t *)&Cla1funcsRunStart, (uint32_t *)&Cla1funcsLoadStart,
(uint32_t)&Cla1funcsLoadSize);
#endif //_FLASH
// Initialize and wait for CLA1ToCPUMsgRAM
MemCfgRegs.MSGxINIT.bit.INIT_CLA1TOCPU = 1;
while(MemCfgRegs.MSGxINITDONE.bit.INITDONE_CLA1TOCPU != 1){};
// Initialize and wait for CPUToCLA1MsgRAM
MemCfgRegs.MSGxINIT.bit.INIT_CPUTOCLA1 = 1;
while(MemCfgRegs.MSGxINITDONE.bit.INITDONE_CPUTOCLA1 != 1){};
// Select LS5RAM to be the programming space for the CLA
// First configure the CLA to be the master for LS5 and then
// set the space to be a program block
MemCfgRegs.LSxMSEL.bit.MSEL_LS5 = 1;
MemCfgRegs.LSxCLAPGM.bit.CLAPGM_LS5 = 1;
//Next configure LS0RAM and LS1RAM as data spaces for the CLA
// First configure the CLA to be the master for LS0(1) and then
// set the spaces to be code blocks
MemCfgRegs.LSxMSEL.bit.MSEL_LS0 = 1;
MemCfgRegs.LSxCLAPGM.bit.CLAPGM_LS0 = 0;
MemCfgRegs.LSxMSEL.bit.MSEL_LS1 = 1;
MemCfgRegs.LSxCLAPGM.bit.CLAPGM_LS1 = 0;
EDIS;
}
void CLA_initCpu1Cla1(void)
{
// Compute all CLA task vectors
// On Type-1 CLAs the MVECT registers accept full 16-bit task addresses as
// opposed to offsets used on older Type-0 CLAs
EALLOW;
Cla1Regs.MVECT1 = (uint16_t)(&Cla1Task1);
Cla1Regs.MVECT2 = (uint16_t)(&Cla1Task2);
Cla1Regs.MVECT3 = (uint16_t)(&Cla1Task3);
Cla1Regs.MVECT4 = (uint16_t)(&Cla1Task4);
Cla1Regs.MVECT5 = (uint16_t)(&Cla1Task5);
Cla1Regs.MVECT6 = (uint16_t)(&Cla1Task6);
Cla1Regs.MVECT7 = (uint16_t)(&Cla1Task7);
Cla1Regs.MVECT8 = (uint16_t)(&Cla1Task8);
// Enable the IACK instruction to start a task on CLA in software
// for all 8 CLA tasks. Also, globally enable all 8 tasks (or a
// subset of tasks) by writing to their respective bits in the
// MIER register
Cla1Regs.MCTL.bit.IACKE = 1;
Cla1Regs.MIER.all = 0x00FF;
// Configure the vectors for the end-of-task interrupt for all
// 8 tasks
PieVectTable.CLA1_1_INT = &cla1Isr1;
PieVectTable.CLA1_2_INT = &cla1Isr2;
PieVectTable.CLA1_3_INT = &cla1Isr3;
PieVectTable.CLA1_4_INT = &cla1Isr4;
PieVectTable.CLA1_5_INT = &cla1Isr5;
PieVectTable.CLA1_6_INT = &cla1Isr6;
PieVectTable.CLA1_7_INT = &cla1Isr7;
PieVectTable.CLA1_8_INT = &cla1Isr8;
// Enable CLA interrupts at the group and subgroup levels
PieCtrlRegs.PIEIER11.all = 0xFFFF;
IER |= (M_INT11 );
}
//*****************************************************************************
// ISR
//*****************************************************************************
__interrupt void cla1Isr1 ()
{
// Acknowledge the end-of-task interrupt for task 1
PieCtrlRegs.PIEACK.all = M_INT11;
// asm(" ESTOP0");
}
__interrupt void cla1Isr2 ()
{
asm(" ESTOP0");
}
__interrupt void cla1Isr3 ()
{
asm(" ESTOP0");
}
__interrupt void cla1Isr4 ()
{
asm(" ESTOP0");
}
__interrupt void cla1Isr5 ()
{
asm(" ESTOP0");
}
__interrupt void cla1Isr6 ()
{
asm(" ESTOP0");
}
__interrupt void cla1Isr7 ()
{
asm(" ESTOP0");
}
__interrupt void cla1Isr8 ()
{
// Acknowledge the end-of-task interrupt for task 8
PieCtrlRegs.PIEACK.all = M_INT11;
// asm(" ESTOP0");
}
// End of File
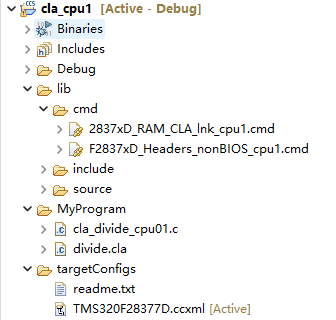
整体工程如下:
文件目录如下:
编译的时候还出现了以下的警告:
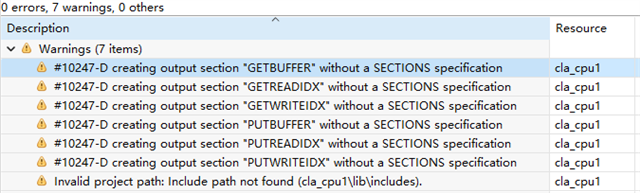
请问到底是哪里出了问题呢?