

Part Number: TMS320F280049C
目前我们在做电机类的相关底层配置。是否能配置如下所示的波形?
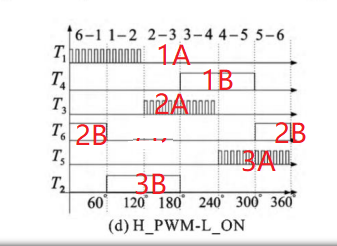
我目前大概了解了一下,也许不全面,希望得到TI比较好的方法。目前我们使用hrpwm4,hrpwm5,hrpwm6。谢谢!
如图所示,图一位示例,图二为示波器实测波形,2B和3B因探头没有多余通道就没有测。

Original question:

Part Number: TMS320F280049C
目前我们在做电机类的相关底层配置。是否能配置如下所示的波形?
我目前大概了解了一下,也许不全面,希望得到TI比较好的方法。目前我们使用hrpwm4,hrpwm5,hrpwm6。谢谢!
如图所示,图一位示例,图二为示波器实测波形,2B和3B因探头没有多余通道就没有测。

