Other Parts Discussed in Thread: CONTROLSUITE
你好!
我正在做一个感应电机控制的项目,使用的DSP是TMS320F28034,PCB是我们自己设计的,并不是使用的TI官方开发套件。
我先导入了HVACI_Sensorless工程进行学习,在Level 2的实验中得出了VdTesting和VqTesting与SpeedRef的对应关系。
比如在Speed=_IQ(0.7);时VdTesting 和VqTesting取_IQ(0.088);可以使电机工作到指定速度,且系统电流最小。
在进行Level 3的实验时,IdRef和IqRef的配置有点疑惑,不知道该如何配置。
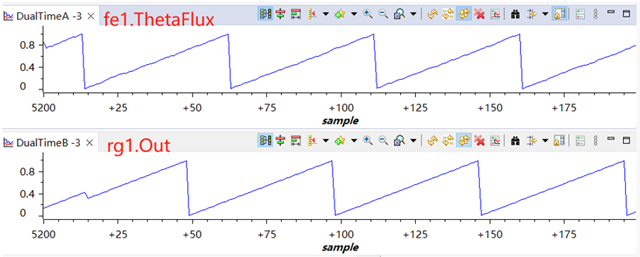
在电流环的PI调节中,输入的feedback是Park变换的输出Ds和Qs(两个电流),参考值是IdRef和IqRef(两个电流),输出D_Out和Q_Out(两个电压)作为反Park变换的输入。
PI调节的目标是反馈值与参考值尽量接近,我能不能将Level2中Park变换的两个输出作为IdRef和IqRef的取值呢?还是这两个值可以通过什么公式算出来?这两个值与什么有关?
还有个疑惑就是,如何配置kp和ki才能满足所有目标速度呢?
请帮忙解答!
祝好!