

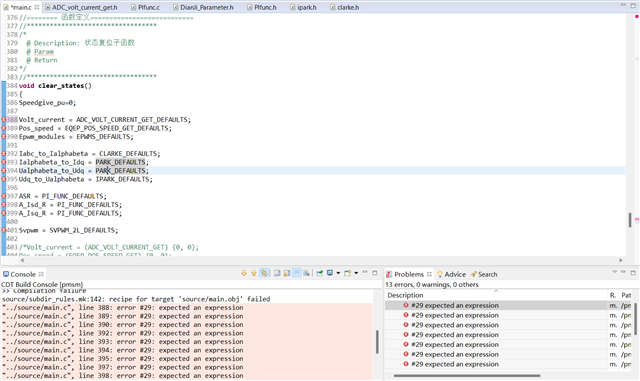
状态复位子函数中提示没有有效的表达式
/*
* main.c
*
* Created on: 2024年10月8日
* Author: 59545
*/
//====================================================
//aMain.c文件
//====================================================
#include "DSP2833x_Project.h"
#include "C28x_FPU_FastRTS.h"
#include <math.h>
#include "dlog4ch.h"
//将用户定义的头文件包含进来
#include "ADC_volt_current_get.h"
#include "ePWMs.h"
#include "eQEP_pos_speed_get.h"
#include "clarke.h"
#include "park.h"
#include "ipark.h"
#include "PIfunc.h"
#include "SVPWM_2L.h"
//=======宏定义=================================================
#define T 0.0002 // PWM调制周期,也是离散化时的采样周期,单位 s
#define PI 3.141592654
#define PI2 6.283185307
//****永磁同步电机参数****
#define MaxRPM 2000 //额定转速,单位 r/min
#define p 3 //电机极对数
#define Rs 0.78 //定子电阻,单位 欧姆
#define Ld 0.0085 //直轴电感,单位 亨
#define Lq 0.0085 //交轴电感,单位 亨
#define KeSha 0.303 //电机转子磁链,单位 韦伯
#define PWMS_FRC_DISABLE 0x0000 //宏定义,禁止ePWM模块强制功能
#define PWMS_ALBL 0x0005 //宏定义,强制ePWM模块中ePWMA为低电平、ePWMB为低电平
#define PWMS_AHBH 0x000A //宏定义,强制ePWM模块中ePWMA为高电平、ePWMB为高电平
#define PWMS_AHBL 0x0006 //宏定义,强制ePWM模块中ePWMA为高电平、ePWMB为低电平
#define PWMS_ALBH 0x0009 //宏定义,强制ePWM模块中ePWMA为低电平、ePWMB为高电平
#define SPEED_STEP 0.0005 //速度步长,标么值,用于速度给定环节
//======== 全局变量 ====================================================
volatile Uint16 Enable_flag = 0; //全局使能位
volatile Uint16 LockRotor_flag = 1; //转子定位使能位
volatile Uint16 LiCi_OK_flag = 1; //永磁同步电机磁场由永磁体建立
volatile Uint16 LockRotor_OK_flag = 0; //转子定位结束标志位,定位前为0,定位后为1
volatile Uint32 Time_speed_cnt = 0; //每次中断加1,当达到速度调节周期时,进行速度PI调节
//定义PI调节器的参数及输出限幅值
volatile float Isdref=0, IsdKp=2, IsdKi=15, IsdLimit = 50; //isd PI调节器
volatile float Isqref=1, IsqKp=2, IsqKi=15, IsqLimit = 50; //isq PI调节器
volatile float Speedref=0, SpeedKp=0.02, SpeedKi=0.1, SpeedLimit=2.0; //速度 PI调节器
volatile float Speedgive_pu=0.05; //变量,用来存储速度斜坡函数的目标值,这里速度给定以标幺化形式表示
volatile float Mech_speed_w=0; //变量,机械角速度
volatile float Elec_speed_w=0; //变量,电角速度
//以下结构体变量的定义与用户在相应头文件里的定义有关,为便于理解,读者可翻阅本书前面介绍的相关文件
ADC_VOLT_CURRENT_GET Volt_current = ADC_VOLT_CURRENT_GET_DEFAULTS; //AD采样模块对应的结构体变量
EQEP_POS_SPEED_GET Pos_speed = EQEP_POS_SPEED_GET_DEFAULTS; //角度与速度测量模块对应的结构体变量
EPWMS Epwm_modules = EPWMS_DEFAULTS; //ePWM模块对应的结构体变量
//坐标变换
CLARKE Iabc_to_Ialphabeta = CLARKE_DEFAULTS;//Clarke变换:电流ia ib ic向iα iβ变换对应的结构体变量
PARK Ialphabeta_to_Idq = PARK_DEFAULTS; //Park变换:电流iα iβ向id iq变换对应的结构体变量
PARK Ualphabeta_to_Udq = PARK_DEFAULTS; //Park变换:电压uα uβ向ud uq变换对应的结构体变量
IPARK Udq_to_Ualphabeta = IPARK_DEFAULTS; //反Park变换:电压ud uq向uα uβ变换对应的结构体变量
//PI调节器对应的结构体变量
PI_FUNC ASR=PI_FUNC_DEFAULTS; //速度PI调节器ASR
PI_FUNC A_Isd_R = PI_FUNC_DEFAULTS; //d轴电流PI调节器A_Isd_R
PI_FUNC A_Isq_R = PI_FUNC_DEFAULTS; //q轴电流PI调节器A_Isq_R
//两电平矢量PWM算法对应的结构体变量
SVPWM_2L Svpwm = SVPWM_2L_DEFAULTS;
//Dlog模块对应的变量
int16 DlogCh1 = 0;
int16 DlogCh2 = 0;
int16 DlogCh3 = 0;
int16 DlogCh4 = 0;
DLOG_4CH dlog = DLOG_4CH_DEFAULTS;
int16 Dlog_cnt=-256;
//========函数声明 ==============================================
void Dlog_init(void); //Dlog初始化函数
interrupt void epwm1_timer_isr(void); //ePWM1周期中断服务函数
void clear_states(void); //状态清除函数
//========主程序==================================================
void main()
{
InitSysCtrl(); //系统初始化
DINT;//关闭全局中断
InitPieCtrl();//初始化中断控制寄存器
IER = 0x0000;//关闭CPU中断
IFR = 0x0000;//清除CPU中断信号
InitPieVectTable();//初始化中断向量表
//延时50ms,等待控制板上其他模块完成初始化
DELAY_US(50000L);
//****初始化Dlog****
Dlog_init();
//****ePWM模块初始化部分****
EALLOW;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 0; //在配置ePWM模块前先禁止TBCLK时钟
EDIS;
//配置 ePWM1模块的周期中断功能
EPwm1Regs.ETSEL.bit.INTSEL = ET_CTR_ZERO; // 选择计数器值=0为中断事件
EPwm1Regs.ETSEL.bit.INTEN = 1; //使能相应的中断
EPwm1Regs.ETPS.bit.INTPRD = ET_1ST; //每次中断事件发生时都产生一次中断请求
EPwm1Regs.ETCLR.bit.INT = 1; //清中断标志位
EALLOW;
PieVectTable.EPWM1_INT = &epwm1_timer_isr; //配置中断向量地址
EDIS;
IER |= M_INT3;// 使能CPU INT3模块的中断功能
PieCtrlRegs.PIEIER3.bit.INTx1 = 1; //使能PIE模块中EPWM INTn
//由于在ePWM.c文件中设定TBCLK = SYSCLKOUT,且为增减计数模式,故三角波周期=2*15000*6.67ns=200us
Epwm_modules.PeriodMax = 15000; //设定计数器的最大计数值
Epwm_modules.init(&Epwm_modules); //调用ePWM模块的初始化函数,开始初始化
EALLOW;
SysCtrlRegs.PCLKCR0.bit.TBCLKSYNC = 1; //配置完成后,重新使能TBCLK时钟信号
EDIS;
//在矢量系统开始工作前,强制ePWM1~ePWM3模块输出脉冲为低电平,避免开关管误开通
EPwm1Regs.AQCSFRC.all = PWMS_ALBL;
EPwm2Regs.AQCSFRC.all = PWMS_ALBL;
EPwm3Regs.AQCSFRC.all = PWMS_ALBL;
//****ADC模块初始化****
Volt_current.init(&Volt_current); //调用ADC模块初始化函数
//****eQEP模块初始化****
Pos_speed.init(&Pos_speed); //调用eQEP模块初始化函数
//****初始化调节器****
ASR.Kp = SpeedKp;
ASR.Ki = SpeedKi;
ASR.OutMax = SpeedLimit;
ASR.OutMin =-SpeedLimit;
A_Isd_R.Kp = IsdKp;
A_Isd_R.Ki = IsdKi;
A_Isd_R.OutMax = IsdLimit;
A_Isd_R.OutMin =-IsdLimit;
A_Isq_R.Kp = IsqKp;
A_Isq_R.Ki = IsqKi;
A_Isq_R.OutMax = IsqLimit;
A_Isq_R.OutMin =-IsqLimit;
//****开始工作****
while(Enable_flag==0); //等待,直到Enable_flag=1时开始向下执行,调试时可直接通过CCS设定Enable_flag的值
EINT; //开CPU中断
ERTM;
//死循环
while(1)
{
if(Enable_flag==0) //如果在运行过程中,Enable_flag被清零,那么强制各个ePWM模块输出为低电平
{
EPwm1Regs.AQCSFRC.all = PWMS_ALBL;
EPwm2Regs.AQCSFRC.all = PWMS_ALBL;
EPwm3Regs.AQCSFRC.all = PWMS_ALBL;
clear_states();
}
else //正常运行时,禁止ePWM模块的强制功能
{
EPwm1Regs.AQCSFRC.all = PWMS_FRC_DISABLE;
EPwm2Regs.AQCSFRC.all = PWMS_FRC_DISABLE;
EPwm3Regs.AQCSFRC.all = PWMS_FRC_DISABLE;
}
}
}
//==============================================================
//中断服务函数
//==============================================================
//**********************************
/*
@ Description: ePWM1周期中断服务函数
@ Param
@ Return
*/
//**********************************
void epwm1_timer_isr()
{
//采样电压电流
Volt_current.read(&Volt_current);
//将ABC坐标系的电流变换到Alpha Beta 坐标系,Clarke变换
Iabc_to_Ialphabeta.As = Volt_current.Ia;
Iabc_to_Ialphabeta.Bs = Volt_current.Ib;
Iabc_to_Ialphabeta.calc(&Iabc_to_Ialphabeta);
//----开始对转子进行初始定位-----------------------------------------------------
/*如果转子磁场建立完成,开始转子定位,由于永磁同步电机转子磁场由永磁体建立,LiCi_OK_flag始终为1。在电励磁同步电机调速过程中,可通过此位判断转子磁场是否建立完成。*/
if(LiCi_OK_flag==1)
{
if( LockRotor_flag ==1 ) //转子定位过程
{
//电流Park变换
Ialphabeta_to_Idq.Alpha=Iabc_to_Ialphabeta.Alpha;
Ialphabeta_to_Idq.Beta =Iabc_to_Ialphabeta.Beta;
Ialphabeta_to_Idq.Cos=1;
Ialphabeta_to_Idq.Sin=0;
Ialphabeta_to_Idq.calc(&Ialphabeta_to_Idq);
//转子定位需要给定α β轴电流,这里将旋转变换角设定为0,即可直接给定d q轴电流
//给定d轴电流,并进行调节
A_Isd_R.Give = 1.0; //单位A
A_Isd_R.Feedback=Ialphabeta_to_Idq.Ds;
A_Isd_R.Kp=IsdKp;
A_Isd_R.Ki=IsdKi;
A_Isd_R.OutMax = IsdLimit;
A_Isd_R.OutMin =-IsdLimit;
A_Isd_R.calc(&A_Isd_R);
IsqKp=IsdKp;
IsqKi=IsdKi;
//给定q轴电流,并进行调节
A_Isq_R.Give = 0;
A_Isq_R.Feedback=Ialphabeta_to_Idq.Qs;
A_Isq_R.Kp=IsqKp;
A_Isq_R.Ki=IsqKi;
A_Isq_R.OutMax = IsqLimit;
A_Isq_R.OutMin =-IsqLimit;
A_Isq_R.calc(&A_Isq_R);
//电压前馈
Udq_to_Ualphabeta.Ds=A_Isd_R.Output;
Udq_to_Ualphabeta.Qs=A_Isq_R.Output;
Udq_to_Ualphabeta.Cos=1;
Udq_to_Ualphabeta.Sin=0;
Udq_to_Ualphabeta.calc(&Udq_to_Ualphabeta);
//Time_LockRotor++;
LockRotor_OK_flag=0;
}
else if(LockRotor_OK_flag==0) //转子初始定位过程结束
{
LockRotor_OK_flag=1; //转子定位结束后,将此位置1
EQep2Regs.QEPCTL.bit.SWI=1; //转子定位过程编码器将转动,这里在定位结束后对eQEP模块重新初始化
}
}
//----转子定位结束--------------------------------------------------------
//----启动电机,并进行矢量闭环控制算法的实现-----------------------------------
if(LockRotor_OK_flag==1) //保证在转子定位结束后,才进行矢量闭环控制算法
{
//速度给定,斜坡函数
if(Time_speed_cnt==100) //100*200us=20000us=20ms
{
//把速度给定限定在额定转速内,支持正反转
if( Speedgive_pu > 1)
{ Speedgive_pu = 1;}
else if( Speedgive_pu < -1)
{ Speedgive_pu = -1;}
if( Speedref > Speedgive_pu )
{
Speedref -= SPEED_STEP;
if( Speedref < Speedgive_pu)
{ Speedref = Speedgive_pu;}
}
else if( Speedref < Speedgive_pu)
{
Speedref += SPEED_STEP;
if( Speedref > Speedgive_pu)
{Speedref = Speedgive_pu;}
}
Pos_speed.calc(&Pos_speed); //读取当前转速
//转速调节PI
ASR.Give = Speedref * MaxRPM; //速度给定
ASR.Feedback = Pos_speed.Speed_Mr_Rpm; //速度反馈
ASR.Kp = SpeedKp;
ASR.Ki = SpeedKi;
ASR.OutMax = SpeedLimit;
ASR.OutMin =-SpeedLimit;
ASR.calc(&ASR);
Time_speed_cnt = 0; //对计数器清零,随后进入下一个计数周期
}
else
{ Time_speed_cnt++; }
//读取d轴与α 轴之间的夹角
Pos_speed.calc(&Pos_speed);
Pos_speed.ElecTheta = Pos_speed.ElecTheta * PI2; //在eQEP角度测量函数里,一周角度范围对应0~1,这里将其化为0~2pi
if(Pos_speed.ElecTheta>PI)
{ Pos_speed.ElecTheta-=PI2; }
//将α β坐标系下的子电流转换到 d q坐标系,Park变换
Ialphabeta_to_Idq.Alpha = Iabc_to_Ialphabeta.Alpha;
Ialphabeta_to_Idq.Beta =Iabc_to_Ialphabeta.Beta;
Ialphabeta_to_Idq.Cos = cos(Pos_speed.ElecTheta);
Ialphabeta_to_Idq.Sin = sin(Pos_speed.ElecTheta);
Ialphabeta_to_Idq.calc(&Ialphabeta_to_Idq);
//Isd调节PI
A_Isd_R.Give = 0; //采用isd=0控制策略
A_Isd_R.Feedback =Ialphabeta_to_Idq.Ds;
A_Isd_R.Kp =IsdKp;
A_Isd_R.Ki =IsdKi;
A_Isd_R.OutMax = IsdLimit;
A_Isd_R.OutMin =-IsdLimit;
A_Isd_R.calc(&A_Isd_R);
IsqKp=IsdKp;
IsqKi=IsdKi;
//Isq调节PI
A_Isq_R.Give = ASR.Output; //转矩电流的给定值 = 转速PI调节器的输出
A_Isq_R.Feedback =Ialphabeta_to_Idq.Qs;
A_Isq_R.Kp =IsqKp;
A_Isq_R.Ki =IsqKi;
A_Isq_R.OutMax = IsqLimit;
A_Isq_R.OutMin =-IsqLimit;
A_Isq_R.calc(&A_Isq_R);
//电压前馈单元,并将d q坐标系下的电压给定转换到α β坐标系
Mech_speed_w = Pos_speed.Speed_Mr_Rpm * PI2 / 60; //机械角速度
Elec_speed_w = Mech_speed_w * Pos_speed.PolePairs; //电角速度
Udq_to_Ualphabeta.Ds =A_Isd_R.Output- Ialphabeta_to_Idq.Qs*Elec_speed_w*Ld;
Udq_to_Ualphabeta.Qs =A_Isq_R.Output+ Ialphabeta_to_Idq.Qs*Rs+KeSha*Elec_speed_w;
Udq_to_Ualphabeta.Cos = cos(Pos_speed.ElecTheta);
Udq_to_Ualphabeta.Sin = sin(Pos_speed.ElecTheta);
Udq_to_Ualphabeta.calc(&Udq_to_Ualphabeta);
}
//----两电平逆变器的控制-----------------------------------------------------------
//两电平SVPWM算法
Svpwm.Ualpha = Udq_to_Ualphabeta.Alpha; //电压前馈单元的输出uα
Svpwm.Ubeta = Udq_to_Ualphabeta.Beta; //电压前馈单元的输出u β
Svpwm.Vdc = Volt_current.Vdc; //通过AD模块测量的直流母线电压
Svpwm.calc(&Svpwm);
//使用ePWM模块输出相应的PWM脉冲
Epwm_modules.Duty1A = Svpwm.Tcmpa;
Epwm_modules.Duty2A = Svpwm.Tcmpb;
Epwm_modules.Duty3A = Svpwm.Tcmpc;
Epwm_modules.update(&Epwm_modules);
//----逆变器控制算法完成-----------------------------------------------------------
//----将变量波形进行量化,配合CCS的Graph功能进行显示-----------------------------------------
Dlog_cnt+=1;
if(Dlog_cnt==257){Dlog_cnt=-256;}
DlogCh1 = (int16) (Dlog_cnt);
DlogCh2 = (int16) (Dlog_cnt);
DlogCh3 = (int16) ( ASR.Give / MaxRPM*512 );
DlogCh4 = (int16) ( ASR.Feedback / MaxRPM*512 );
dlog.update(&dlog);
EPwm1Regs.ETCLR.bit.INT = 1; //清除中断标志位
PieCtrlRegs.PIEACK.all = PIEACK_GROUP3;
}
//======== 函数定义===========================
//**********************************
/*
@ Description: 状态复位子函数
@ Param
@ Return
*/
//**********************************
void clear_states()
{
Speedgive_pu=0;
Volt_current = ADC_VOLT_CURRENT_GET_DEFAULTS;
Pos_speed = EQEP_POS_SPEED_GET_DEFAULTS;
Epwm_modules = EPWMS_DEFAULTS;
Iabc_to_Ialphabeta = CLARKE_DEFAULTS;
Ialphabeta_to_Idq = PARK_DEFAULTS;
Ualphabeta_to_Udq = PARK_DEFAULTS;
Udq_to_Ualphabeta = IPARK_DEFAULTS;
ASR = PI_FUNC_DEFAULTS;
A_Isd_R = PI_FUNC_DEFAULTS;
A_Isq_R = PI_FUNC_DEFAULTS;
Svpwm = SVPWM_2L_DEFAULTS;
/*Volt_current = (ADC_VOLT_CURRENT_GET) {0, 0};
Pos_speed = (EQEP_POS_SPEED_GET) {0, 0};
Epwm_modules = (EPWMS) {0, 0, 0};
Iabc_to_Ialphabeta = (CLARKE) {0, 0};
Ialphabeta_to_Idq = (PARK) {0, 0};
Ualphabeta_to_Udq = (PARK) {0, 0};
Udq_to_Ualphabeta = (IPARK) {0, 0};
ASR = (PI_FUNC) {0, 0};
A_Isd_R = (PI_FUNC) {0, 0};
A_Isq_R = (PI_FUNC) {0, 0};
Svpwm = (SVPWM_2L) {0, 0, 0};*/
}
//**********************************
/*
@ Description: Dlog初始化子函数
@ Param
@ Return
*/
//**********************************
void Dlog_init(void)
{
dlog.iptr1 = &DlogCh1;
dlog.iptr2 = &DlogCh2;
dlog.iptr3 = &DlogCh3;
dlog.iptr4 = &DlogCh4;
dlog.trig_value = 0x0;
dlog.size = 0x400;
dlog.prescalar = 1;
dlog.init(&dlog);
}
//==============================================================
//End of file.
//==============================================================