

Part Number: TMS320F28335
Other Parts Discussed in Thread: C2000WARE
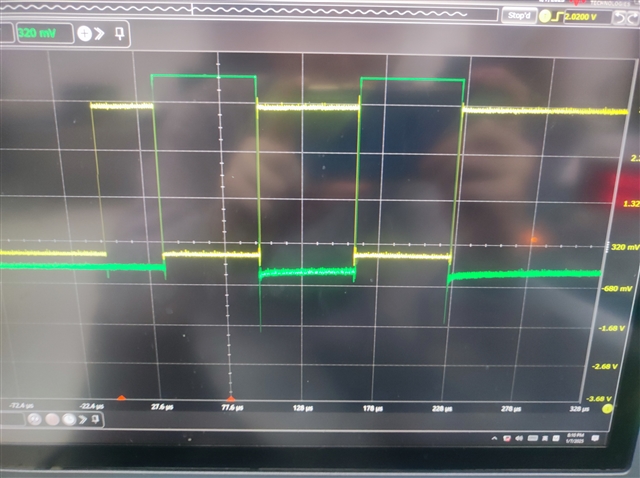
用示波器测试了pwmA2(黄色)和pwmB2(绿色)引脚,配置的是pwmA2为高电平,pwmB2为低电平,发现pwmA2(黄色)和pwmB2(绿色)开始有三次高低电平翻转(并且死区和我配置的死区时间是一致的),翻转后pwmA2为高电平,pwmB2为低电平,请问为什么上电后有高低电平翻转,需要配置什么才能把这个现象清除。
并且不只是pwmA2和pwmB2有这个现象,pwmA1和pwmB1,pwmA3和pwmB3同样有此现象。
