

Part Number: TMS320F28384D
Other Parts Discussed in Thread: SYSCONFIG
I hope this email finds you well.
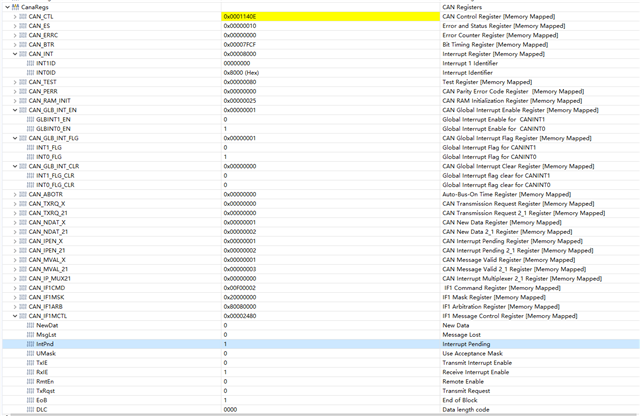
I am currently working on a project involving the CAN peripheral on the 28384D microcontroller. I have encountered an issue where I am unable to use the CAN interrupt functionality. However, the CAN peripheral works fine when I use polling.
To help diagnose the problem, I am providing the relevant configuration details from SysConfig and the runtime register values below: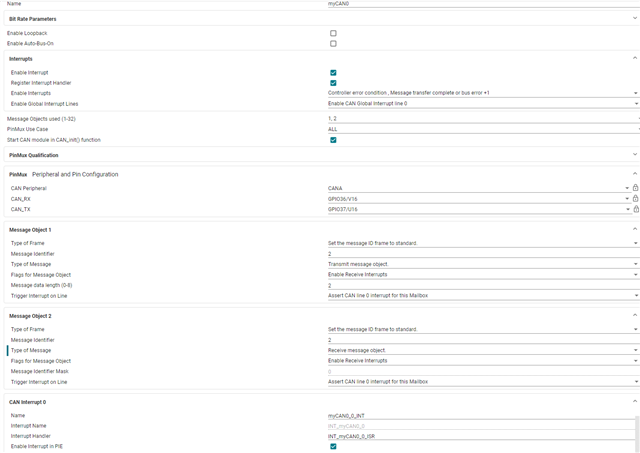
//#############################################################################
//
// FILE: can_ex1_loopback.c
//
// TITLE: CAN External Loopback Example
//
//! \addtogroup driver_example_list
//! <h1> CAN External Loopback </h1>
//!
//! This example shows the basic setup of CAN in order to transmit and receive
//! messages on the CAN bus. The CAN peripheral is configured to transmit
//! messages with a specific CAN ID. A message is then transmitted once per
//! second, using a simple delay loop for timing. The message that is sent is
//! a 2 byte message that contains an incrementing pattern.
//!
//! This example sets up the CAN controller in External Loopback test mode.
//! Data transmitted is visible on the CANTXA pin and is received internally
//! back to the CAN Core. Please refer to details of the External Loopback
//! Test Mode in the CAN Chapter in the Technical Reference Manual. Refer
//! to [Programming Examples and Debug Strategies for
//! the DCAN Module](www.ti.com/lit/SPRACE5) for useful information about
//! this example
//!
//! \b External \b Connections \n
//! - None.
//!
//! \b Watch \b Variables \n
//! - msgCount - A counter for the number of successful messages received
//! - txMsgData - An array with the data being sent
//! - rxMsgData - An array with the data that was received
//!
//
//#############################################################################
//
//
//
// C2000Ware v5.03.00.00
//
// Copyright (C) 2024 Texas Instruments Incorporated - http://www.ti.com
//
// Redistribution and use in source and binary forms, with or without
// modification, are permitted provided that the following conditions
// are met:
//
// Redistributions of source code must retain the above copyright
// notice, this list of conditions and the following disclaimer.
//
// Redistributions in binary form must reproduce the above copyright
// notice, this list of conditions and the following disclaimer in the
// documentation and/or other materials provided with the
// distribution.
//
// Neither the name of Texas Instruments Incorporated nor the names of
// its contributors may be used to endorse or promote products derived
// from this software without specific prior written permission.
//
// THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
// "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
// LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS FOR
// A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE COPYRIGHT
// OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL,
// SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT
// LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES; LOSS OF USE,
// DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER CAUSED AND ON ANY
// THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT LIABILITY, OR TORT
// (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT OF THE USE
// OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
// $
//#############################################################################
//
// Included Files
//
#include "driverlib.h"
#include "device.h"
#include "board.h"
//
// Defines
//
#define MSG_DATA_LENGTH 2
#define TX_MSG_OBJ_ID 1
#define RX_MSG_OBJ_ID 2
//
// Globals
//
volatile unsigned long msgCount = 0;
uint16_t txMsgData[2], rxMsgData[2];
uint16_t errorFlag = 0;
uint16_t rxMsgCount = 0;
//
// Main
//
void main(void)
{
uint16_t txMsgData[2], rxMsgData[2];
//
// Initialize device clock and peripherals
//
Device_init();
//
// Initialize GPIO and configure GPIO pins for CANTX/CANRX
//
Device_initGPIO();
//
// Allocated shared peripheral to C28x
//
SysCtl_allocateSharedPeripheral(SYSCTL_PALLOCATE_CAN_A,0x0U);
SysCtl_allocateSharedPeripheral(SYSCTL_PALLOCATE_CAN_B,0x0U);
//
// Board initialization
//
Board_init();
//
// Initialize PIE and clear PIE registers. Disables CPU interrupts.
//
Interrupt_initModule();
//
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
//
Interrupt_initVectorTable();
//
// Enable Global Interrupt (INTM) and realtime interrupt (DBGM)
//
EINT;
ERTM;
//
// Setup send and receive buffers
//
txMsgData[0] = 0x01;
txMsgData[1] = 0x02;
*(uint16_t *)rxMsgData = 0;
GPIO_togglePin(myBoardLED0_GPIO);
DEVICE_DELAY_US(500000);
GPIO_togglePin(myBoardLED0_GPIO);
GPIO_togglePin(myBoardLED1_GPIO);
DEVICE_DELAY_US(500000);
GPIO_togglePin(myBoardLED1_GPIO);
//
// Loop Forever - Send and Receive data continuously
//
for(;;)
{
//
// Send CAN message data from message object 1
//
/*
CAN_sendMessage(myCAN0_BASE, 1, MSG_DATA_LENGTH, txMsgData);
CAN_readMessage(myCAN0_BASE, RX_MSG_OBJ_ID, rxMsgData);
SCI_writeCharNonBlocking(mySCI0_BASE, rxMsgData[0]);
DEVICE_DELAY_US(500000);
*/
}
}
__interrupt void INT_myCAN0_0_ISR(void)
{
uint32_t status;
GPIO_togglePin(myBoardLED0_GPIO);
//
// Read the CAN-B interrupt status to find the cause of the interrupt
//
status = CAN_getInterruptCause(myCAN0_BASE);
//SCI_writeCharNonBlocking(mySCI0_BASE, status);
//
// If the cause is a controller status interrupt, then get the status
//
/*if(status == CAN_INT_INT0ID_STATUS)
{
//
// Read the controller status. This will return a field of status
// error bits that can indicate various errors. Error processing
// is not done in this example for simplicity. Refer to the
// API documentation for details about the error status bits.
// The act of reading this status will clear the interrupt.
//
status = CAN_getStatus(myCAN0_BASE);
//
// Check to see if an error occurred.
//
if(((status & ~(CAN_STATUS_RXOK)) != CAN_STATUS_LEC_MSK) &&
((status & ~(CAN_STATUS_RXOK)) != CAN_STATUS_LEC_NONE))
{
//
// Set a flag to indicate some errors may have occurred.
//
errorFlag = 1;
}
//GPIO_togglePin(myBoardLED1_GPIO);
}*/
//
// Check if the cause is the CAN receive message object 1
//
if(status == RX_MSG_OBJ_ID)
{
//
// Get the received message
//
GPIO_togglePin(myBoardLED1_GPIO);
CAN_readMessage(myCAN0_BASE, RX_MSG_OBJ_ID, rxMsgData);
//
// Getting to this point means that the RX interrupt occurred on
// message object 1, and the message RX is complete. Clear the
// message object interrupt.
//
CAN_clearInterruptStatus(myCAN0_BASE, RX_MSG_OBJ_ID);
//
// Increment a counter to keep track of how many messages have been
// received. In a real application this could be used to set flags to
// indicate when a message is received.
//
rxMsgCount++;
errorFlag = 0;
//GPIO_writePin(myBoardLED0_GPIO, tag);
SCI_writeCharNonBlocking(mySCI0_BASE, rxMsgData[0]);
CAN_sendMessage(myCAN0_BASE, TX_MSG_OBJ_ID, MSG_DATA_LENGTH, rxMsgData);
//
// Since the message was received, clear any error flags.
//
}
//
// If something unexpected caused the interrupt, this would handle it.
//
else
{
//
// Spurious interrupt handling can go here.
//
}
//
// Clear the global interrupt flag for the CAN interrupt line
//
// SCI_writeCharNonBlocking(mySCI0_BASE, tag);
CAN_clearGlobalInterruptStatus(myCAN0_BASE, CAN_GLOBAL_INT_CANINT0);
//
// Acknowledge this interrupt located in group 9
//
Interrupt_clearACKGroup(INTERRUPT_ACK_GROUP9);
}
__interrupt void INT_myCAN0_1_ISR(void)
{
}
//
// End of File
//
