

小弟最近刚刚开始学习MSP430,购买了官方的两块MSP430F5529LP开发板,现在想完成两块板子之间的通信,连接的框图如下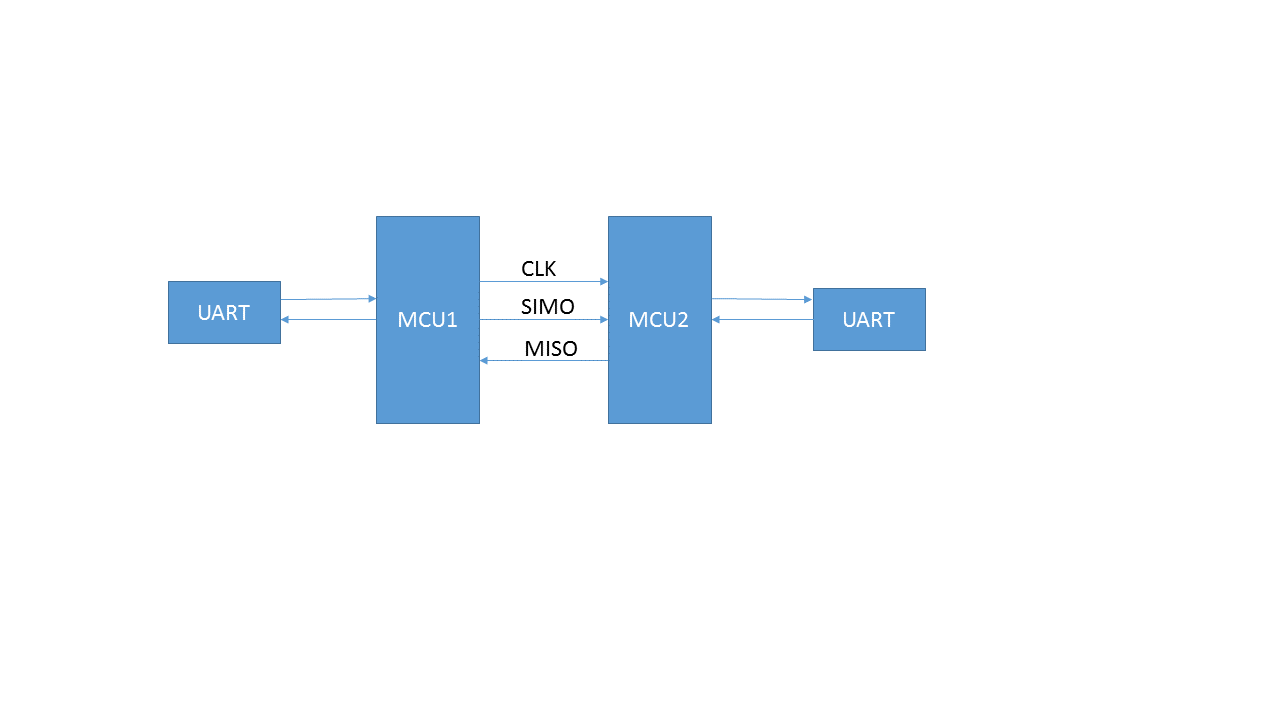
两块板子之间采用三线SPI口连接,传输输出测试时采用UART接口观察,其中两块板子的USCI_AO口配置成UART,USCI_BO口配置成SPI,均配置接受中断,现在测试过程中发现以下两个问题希望可以得到解答:
1、将测试数据从MCU1的UART输入,MCU2的UART能正常接受到数据,但是同时MCU1的UART接受到0X00;
2、将测试数据从MCU2的UART输入,MCU1未能接收到任何数据
主机MCU1代码如下:
/////////////////////////master/////////////////////
#include <msp430f5529.h>
void clock_init(void);
void uart_init(void);
void spi_init(void);
void led1_init(void);
void led2_init(void);
_Bool uart_state=0; //show the state of uart, if uart_state=0,no data
_Bool spi_state =0; //show the state of spi, if spi_state = 0, no data
void main(void)
{
WDTCTL = WDTPW + WDTHOLD; // Stop WDT
clock_init();
uart_init();
spi_init();
led1_init();
led2_init();
__bis_SR_register(GIE); // interrupts enabled
while(1)
{
if(uart_state)
{
while (!(UCB0IFG&UCTXIFG)); // USCI_B0 TX buffer ready?
UCB0TXBUF = UCA0RXBUF;
uart_state=0;
}
if(spi_state)
{
while (!(UCA0IFG&UCTXIFG)); // USCI_A0 TX buffer ready?
UCA0TXBUF = UCB0RXBUF; // TX -> RXed character
spi_state=0;
}
}
}
/*********************************************************************************
//初始化时钟,选用XT2作为SMCLK和MCLK的频率
***********************************************************************************/
void clock_init(void)
{
P5SEL |= BIT2|BIT3; //将IO配置为XT2功能
UCSCTL6 &= ~XT2OFF; //使能XT2
UCSCTL4 = UCSCTL4&(~(SELA_7))|SELA_1; //先将ACLK配置为VLOCLK
UCSCTL3 |= SELREF_2; //将REFCLK配置为REFCLK
while (SFRIFG1 & OFIFG){
UCSCTL7 &= ~(XT2OFFG + XT1LFOFFG + DCOFFG); // 清除三类时钟标志位
// 这里需要清除三种标志位,因为任何一种
// 标志位都会将OFIFG置位
SFRIFG1 &= ~OFIFG; // 清除时钟错误标志位
}
UCSCTL4 = UCSCTL4&(~(SELS_7|SELM_7))|SELS_5|SELM_5; //将SMCLK和MCLK时钟源配置为XT2
}
/*********************************************************************************
//初始化串口,宣统P3.3,4作为TXD/RXD,波特率为115200
*********************************************************************************/
void uart_init(void)
{
P3SEL = BIT3+BIT4; // P3.3,4 = USCI_A0 TXD/RXD
UCA0CTL1 |= UCSWRST; // **Put state machine in reset**
UCA0CTL1 |= UCSSEL_2; // CLK = MCLK
UCA0BR0 = 0x22; //
UCA0BR1 = 0x00; //
UCA0MCTL = UCBRS_6+UCBRF_0; // Modulation UCBRSx=3, UCBRFx=0
UCA0CTL1 &= ~UCSWRST; // **Initialize USCI state machine**
UCA0IE |= UCRXIE; // Enable USCI_A0 RX interrupt
}
/*********************************************************************************
//初始LED1,P1.0灯作为调试工具
*********************************************************************************/
void led1_init(void)
{
P1DIR |= BIT0; // P1.0 set as output
P1OUT &= ~BIT0; // P1.0 set as 0
}
/*********************************************************************************
//初始LED2,P4.7灯作为调试工具
*********************************************************************************/
void led2_init(void)
{
P4DIR |= BIT7; // P1.0 set as output
P4OUT &= ~BIT7; // P1.0 set as 0
}
/*********************************************************************************
//初始化SPI接口
*********************************************************************************/
void spi_init(void)
{
P3SEL |= BIT0+ BIT1+BIT2; //P3.0,1,2option select,BIT2= clock
UCB0CTL1 |= UCSWRST;
UCB0CTL0 |= UCMST+UCSYNC+UCCKPL+UCMSB;
UCB0CTL1 |= UCSSEL_2; // SMCLK
UCB0BR0 = 0x22; // /2
UCB0BR1 = 0x00; //
//UCB0MCTL = 0; // No modulation
UCB0CTL1 &= ~UCSWRST; // **Initialize USCI state machine**
UCB0IE |= UCRXIE; // Enable USCI_B0 RX interrupt
}
/*********************************************************************************
//中断函数,处理串口接受的中断
*********************************************************************************/
#pragma vector=USCI_A0_VECTOR
__interrupt void USCI_A0_ISR(void)
{
switch(__even_in_range(UCA0IV,4))
{
case 0:break; // Vector 0 - no interrupt
case 2: // Vector 2 - RXIFG
//while (!(UCB0IFG&UCTXIFG)); // USCI_B0 TX buffer ready?
//UCB0TXBUF = UCA0RXBUF; // TX -> RXed character
if(! uart_state)
{
uart_state = 1;
}
else
{
P1OUT |= BIT0;
}
break;
case 4:break; // Vector 4 - TXIFG
default: break;
}
}
/*********************************************************************************
//中断函数,处理SPI接受的中断
*********************************************************************************/
#pragma vector=USCI_B0_VECTOR
__interrupt void USCI_B0_ISR(void)
{
switch(__even_in_range(UCB0IV,4))
{
case 0:break; // Vector 0 - no interrupt
case 2: // Vector 2 - RXIFG
if(! spi_state)
{
spi_state = 1;
}
else
{
P4OUT |= BIT7;
}
break;
case 4:break; // Vector 4 - TXIFG
default: break;
}
}
从机MCU2的代码如下:
/*******************************slave*******************************************/
#include <msp430f5529.h>
void clock_init(void);
void uart_init(void);
void spi_init(void);
void led1_init(void);
void led2_init(void);
_Bool uart_state=0; //show the state of uart, if uart_state=0,no data
_Bool spi_state =0; //show the state of spi, if spi_state = 0, no data
void main(void)
{
WDTCTL = WDTPW + WDTHOLD; // Stop WDT
clock_init();
uart_init();
spi_init();
led1_init();
led2_init();
__bis_SR_register(GIE); //interrupts enabled
while(1)
{
if(uart_state)
{
while (!(UCB0IFG&UCTXIFG)); // USCI_B0 TX buffer ready?
UCB0TXBUF = UCA0RXBUF;
uart_state=0;
}
if(spi_state)
{
while (!(UCA0IFG&UCTXIFG)); // USCI_A0 TX buffer ready?
UCA0TXBUF = UCB0RXBUF; // TX -> RXed character
spi_state =0;
}
}
}
/*********************************************************************************
//初始化时钟,选用XT2作为SMCLK和MCLK的频率
***********************************************************************************/
void clock_init(void)
{
P5SEL |= BIT2|BIT3; //将IO配置为XT2功能
UCSCTL6 &= ~XT2OFF; //使能XT2
UCSCTL4 = UCSCTL4&(~(SELA_7))|SELA_1; //先将ACLK配置为VLOCLK
UCSCTL3 |= SELREF_2; //将REFCLK配置为REFCLK
while (SFRIFG1 & OFIFG){
UCSCTL7 &= ~(XT2OFFG + XT1LFOFFG + DCOFFG); // 清除三类时钟标志位
// 这里需要清除三种标志位,因为任何一种
// 标志位都会将OFIFG置位
SFRIFG1 &= ~OFIFG; // 清除时钟错误标志位
}
UCSCTL4 = UCSCTL4&(~(SELS_7|SELM_7))|SELS_5|SELM_5; //将SMCLK和MCLK时钟源配置为XT2
}
/*********************************************************************************
//初始化串口,宣统P3.3,4作为TXD/RXD,波特率为115200
*********************************************************************************/
void uart_init(void)
{
P3SEL = BIT3+BIT4; // P3.3,4 = USCI_A0 TXD/RXD
UCA0CTL1 |= UCSWRST; // **Put state machine in reset**
UCA0CTL1 |= UCSSEL_2; // CLK = MCLK
UCA0BR0 = 0x22; //
UCA0BR1 = 0x00; //
UCA0MCTL = UCBRS_6+UCBRF_0; // Modulation UCBRSx=3, UCBRFx=0
UCA0CTL1 &= ~UCSWRST; // **Initialize USCI state machine**
UCA0IE |= UCRXIE; // Enable USCI_A0 RX interrupt
}
/*********************************************************************************
//初始LED1,P1.0灯作为调试工具
*********************************************************************************/
void led1_init(void)
{
P1DIR |= BIT0; // P1.0 set as output
P1OUT &= ~BIT0; // P1.0 set as 0
}
/*********************************************************************************
//初始LED2,P4.7灯作为调试工具
*********************************************************************************/
void led2_init(void)
{
P4DIR |= BIT7; // P1.0 set as output
P4OUT &= ~BIT7; // P1.0 set as 0
}
/*********************************************************************************
//初始化SPI接口
*********************************************************************************/
void spi_init(void)
{
P3SEL |= BIT0+ BIT1+BIT2; //P3.0,1,2option select,BIT2= clock
UCB0CTL1 |= UCSWRST;
UCB0CTL0 |= UCSYNC+UCCKPL+UCMSB; //
//UCB0MCTL = 0; // No modulation
UCB0CTL1 &= ~UCSWRST; // **Initialize USCI state machine**
UCB0IE |= UCRXIE; // Enable USCI_B0 RX interrupt
}
/*********************************************************************************
//中断函数,处理串口接受的中断
*********************************************************************************/
#pragma vector=USCI_A0_VECTOR
__interrupt void USCI_A0_ISR(void)
{
switch(__even_in_range(UCA0IV,4))
{
case 0:break; // Vector 0 - no interrupt
case 2: // Vector 2 - RXIFG
//while (!(UCB0IFG&UCTXIFG)); // USCI_B0 TX buffer ready?
//UCB0TXBUF = UCA0RXBUF; // TX -> RXed character
if(! uart_state)
{
uart_state = 1;
}
else
{
P1OUT |= BIT0;
}
break;
case 4:break; // Vector 4 - TXIFG
default: break;
}
}
/*********************************************************************************
//中断函数,处理SPI接受的中断
*********************************************************************************/
#pragma vector=USCI_B0_VECTOR
__interrupt void USCI_B0_ISR(void)
{
switch(__even_in_range(UCB0IV,4))
{
case 0:break; // Vector 0 - no interrupt
case 2: // Vector 2 - RXIFG
//while (!(UCA0IFG&UCTXIFG)); // USCI_A0 TX buffer ready?
//UCA0TXBUF = UCB0RXBUF; // TX -> RXed character
if(! spi_state)
{
spi_state = 1;
}
else
{
P4OUT |= BIT7;
}
break;
case 4:break; // Vector 4 - TXIFG
default: break;
}
}

