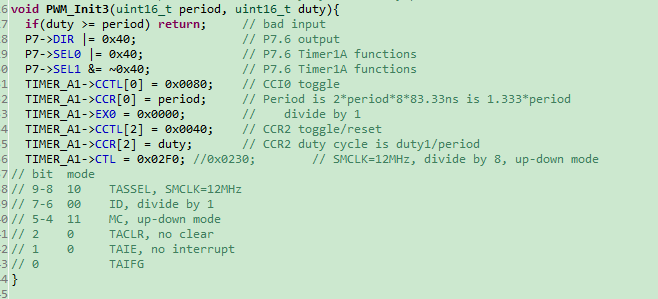
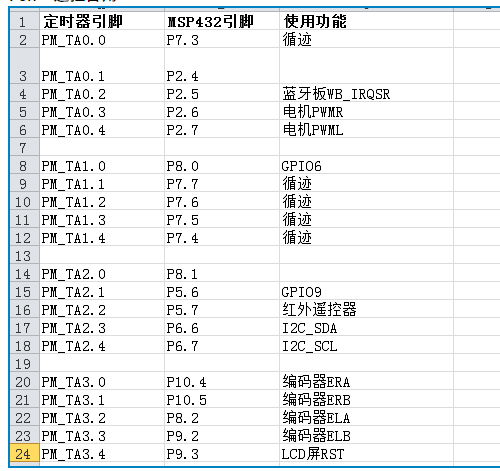
MSP432P401R的TA1.0或TA2.0之类的引脚如何配置PWM引脚操作舵机的机械臂,可以使用PWM功能的引脚及占用情况如下,想问一下YTA0.0、TA1.0的引脚可以操作PWM舵机吗?如何配置,没有多余的引脚了,需要3路PWM,端口映射也找不到合适的。
MSP432P401R的TA1.0或TA2.0之类的引脚如何配置PWM引脚操作舵机的机械臂,可以使用PWM功能的引脚及占用情况如下,想问一下YTA0.0、TA1.0的引脚可以操作PWM舵机吗?如何配置,没有多余的引脚了,需要3路PWM,端口映射也找不到合适的。