第三章 时钟系统(CS)
3.1 本章引言
时钟系统(Clock System)模块支持低成本和低功耗。通过使用4个内部时钟信号,用户可以在低功耗和性能之间做到最好的平衡。
时钟模块可以配置成无需任何外部组件,使用一个外部电阻器或完全使用DCO旁路模式。
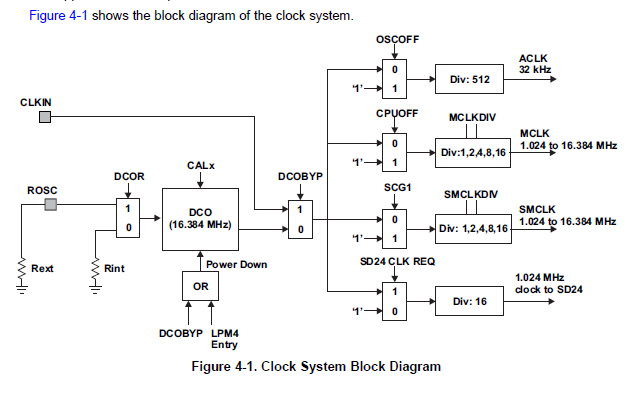
时钟模块有四个系统时钟信号可以使用:
- ACLK:辅助时钟。当运行在DCO时,ACLK是固定在32kHz。如果设备是设置在DCO旁路模式,ACLK运行在旁路时钟频率的1/512。
- MCLK:主时钟。MCLK可以被1,2,4,8或16分频。MCLK通常被CPU和系统使用。
- SMCLK:子系统主时钟。SMCLK可以被1,2,4,8或16分频。SMCLK可以被各个外围模块通过软件选择使用。
- SD24CLK:SD24时钟提供一个1.024MHz固定频率的时钟给Sigma-Delta ADC(SD24)。
该时钟只为SD24的请求所使用。如果SD24功能必须在DCO旁路模式下工作,那么外部时钟频率必须是16.384Mhz。
这个驱动程序包含在cs.c文件里,cs.h头文件包含该应用程序使用的API定义。
3.2 函数总览
宏
#define CS_DCO_FREQ 16384000
|
1
|
void GS_setupDCO ( uint8_t mode )
|
|
使用选中的模式配置DCO
|
|
|
2
|
void CS_initClockSignal (uint8_t clockSource, uint8_t clockSourceDivider)
|
|
使用分频器初始化时钟信号
|
|
|
3
|
uint32_t CS_getACLK (void)
|
|
获取当前ACLK的频率(单位Hz)
|
|
|
4
|
uint32_t CS_getSMCLK (void)
|
|
获取当前SMCLK的频率(单位Hz)
|
|
|
5
|
uint32_t CS_getMCLK (void)
|
|
获取当前MCLK的频率(单位Hz)
|
|
|
6
|
uint8_t CS_getFaultFlagStatus (uint8_t mask)
|
|
获取DCO故障(或错误)标志状态
|
CS API函数分为三组:配置时钟模块的、侦测时钟速度的和CS错误标记处理的。
CS一般配置和初始化的函数有:
- CS_setupDCO()
- CS_initClockSignal()
侦测时钟速度的函数有:
- CS_getACLK()
- CS_getSMCLK()
- CS_getMCLK()
CS错误标志处理的函数有:
- CS_getFaultFlagStatus()
函数CS_getMCLK,CS_getSMCLK,CS_getACLK只在使用内部或外部电阻或者16.384MHz的旁路时钟频率下使用DCO才是精确有效的。
详细描述
uint32_t CS_getACLK(void)
获取当前ACLK频率(单位Hz)。当设备安装在DCO旁路模式下,它不能正常工作。此外,使用这个API前应该调用CS_setupDCO(),以便DCO被校准,这样计算才是精确的。
返回值:当前ACLK频率,单位Hz,当旁路模式下返回0。
uin8_t CS_getFaultFlagStatus(uint8_t mask)
获取DCO错误标志状态。当DCO在外部电阻模式和DCO检测到异常时候,DCO故障标志将被置位(写1)。异常可能是,ROSC端子保持开路或者短接到地,或者连接在ROSC端子的电阻远离推荐的值。如果故障仍然存在,DCO就会自动切换到内部电阻模式作为一种处理故障的安全机制。
mask:mask参数有CS_DCO_FAULT_FLAG.
返回值:CS_DCO_FAULT_FLAG。说明错误标志被置位。
uint32_t CS_getMCLK(void)
获取当前MCLK频率(单位Hz)。当设备安装在DCO旁路模式下,它不能正常工作。此外,使用这个API前应该调用CS_setupDCO(),以便DCO被校准,这样计算才是精确的。
返回值:当前MCLK频率,单位Hz,当旁路模式下返回0。
uint32_t CS_getSMCLK(void)
获取当前SMCLK频率(单位Hz)。当设备安装在DCO旁路模式下,它不能正常工作。此外,使用这个API前应该调用CS_setupDCO(),以便DCO被校准,这样计算才是精确的。
返回值:当前SMCLK频率,单位Hz,当旁路模式下返回0。
void CS_initClockSignal( uint8_t clockSource, uint8_t clockSourceDivider )
使用分频器初始化一个时钟信号。
如果DCO是在旁路模式下,频率将是CLKIN/分频器。如果DCO不在旁路模式下,频率将是16.384MHz/分频器。
该函数有两个参数:clockSource和clockSourceDivider。
clockSource时钟信号初始化值可以选的值有:CS_MCLK,CS_SMCLK。
clockSourceDivider分频器设置可选的值有:CS_CLOCK_DIVIDER_1,CS_CLOCK_DIVIDER_2,CS_CLOCK_DIVIDER_4,CS_CLOCK_DIVIDER_8,CS_CLOCK_DIVIDER_16。
返回值:无。
void CS_setupDCO( uint8_t mode )
使用参数所选模式配置DCO。如果选择旁路模式,则需要在CLKIN管脚接入外部数字时钟信号来作为所有的设备(CPU、外设等)的时钟信号。ACLK频率是不可以被编程的,且固定在旁路时钟频率除以512。使用外部吊足模式,需要在ROSC管脚连接一个20KΩ的电阻器。与使用内部电阻相比,使用外部电阻模式,在绝对误差和温度漂移上,可以提供更高的时钟精度。请根据你所选的设备型号对应的数据手册的详细情况来选择不同的模式。
该函数只有一个参数:mode。
mode:该参数可以选择的量有CS_INTERNAL_RESISTOR,CS_EXTERNAL_RESISTOR,CS_BYPASS_MODE。
返回值:空。
注释:DCO的配置可以使用内部电阻和外部电阻,还有一个就是旁路模式,旁路模式就是可以通过一个时钟输入管脚将外部时钟信号灌入系统。
3.3 例程
下面的例程演示如何配置CS模块,设置为SMCLK=DCO/2,MCLK=DCO/8。
//先配置DCO频率为16.384MHz.
CS_setupDCO(CS_INTERNAL_RESISTOR);
//配置完DCO才可以配置MCLK和SMCLK
CS_initClockSignal(CS_MCLK, CS_CLKOCK_DIVIDER_8);
CS_initClockSignal(CS_SMCLK, CS_CLKOCK_DIVIDER_2);