Part Number: EVM430-FR6043
技术支持,你们好:
现在我有个问题,希望你们能帮助我或者将这篇帖子发到英文论坛中,
我是使用这款评估版做一个如同SLAA951文档中所述的一个应用于液体液面高度的测量,是基于官方的Gas_Demo来做的,使用的换能器也是嘉康的200KHz换能器,我在Demo中找到了大部分在Ultrasonic Sensing Design Center中需要配置的参数,其具体配置如下图所示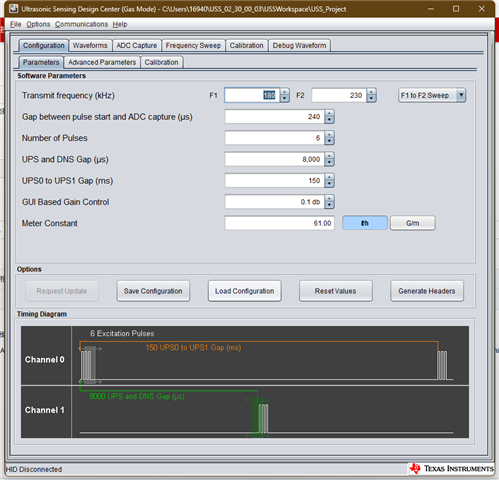
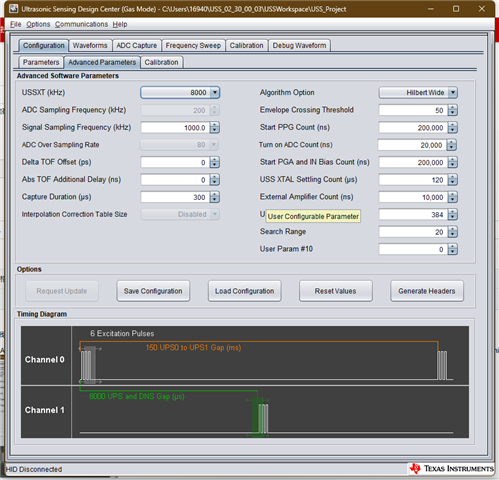 。
。
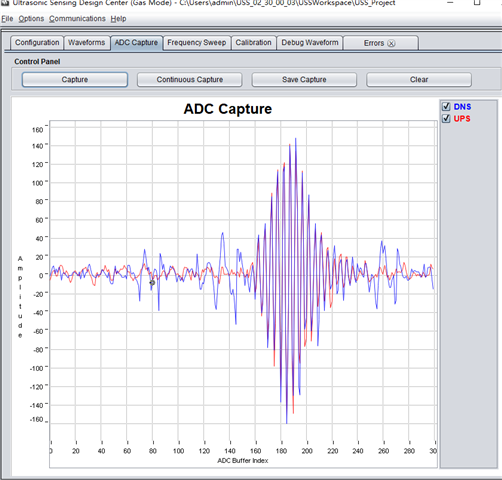
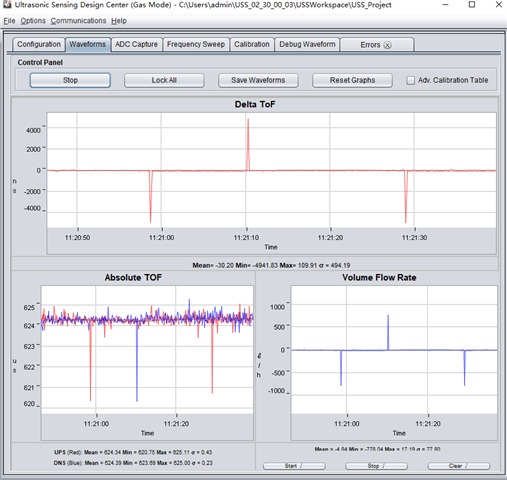
我的想法如下图所示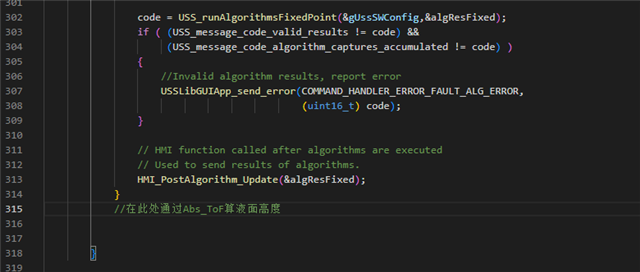 ,当运行了USSLibGUIAPP.c文件中的USSLibGUIApp_Engine()函数后,在Abs_ToF更新后通过这个时间来计算声波所运动的距离,不知道这样是否可行?
,当运行了USSLibGUIAPP.c文件中的USSLibGUIApp_Engine()函数后,在Abs_ToF更新后通过这个时间来计算声波所运动的距离,不知道这样是否可行?
如若可行,以下是我在将代码烧录至芯片后,出现的一些问题:
1、只有在所需要测量量程的中段才能正确的测量出来,比如,容器高度为10cm,只能测出液面处于4-7这一段时的液面高度。
2、因为SLAA951文档中所述,其测距的量程为1.5-20cm,当容器中的液体与换能器在2cm时,其ABS_TOF应当为一个很小的值,但实际情况却是要么值一直为0,要么值稳定在250us左右,按这个飞行时间的一半来计算距离也不止2cm
3、当容器中没有液体时,这个值(ABS_TOF)本应当为很大的一个值,可实际情况是这个值却直接变为0。
4、在能正常输出Abs_ToF时,当液面波动稍微大一点时,这个值会在出现瞬间突变为0,然后恢复正常。这应该修改哪里的设置。
以上是我的问题,如果对我的描述不能理解,请直接问。
我真诚的希望能够将这些问题解决,谢谢!