

void I2CInit(void)
{
MAP_SysCtlPeripheralEnable(SYSCTL_PERIPH_I2C2);
MAP_GPIOPinConfigure(GPIO_PL0_I2C2SDA);
MAP_GPIOPinTypeI2C(GPIO_PORTL_BASE, GPIO_PIN_0);
MAP_GPIOPinConfigure(GPIO_PL1_I2C2SCL);
MAP_GPIOPinTypeI2CSCL(GPIO_PORTL_BASE, GPIO_PIN_1);
I2CMasterInitExpClk(I2C2_BASE, 120000000, 1);
I2CMasterEnable(I2C2_BASE);
}
/*
*********************************************************************************************************
** 函数名称: FM24CL64WritePolled()
** 函数功能: 向FM24CL64写字符
** 入口参数: pucdata 数据发送缓冲区指针
ucAddr FM25CL64子地址
ulCount 写入的个数
** 出口参数 true 写入成功
false 写入失败
*********************************************************************************************************
*/
bool
FM24CL64Write(uint8_t fm24cl64_addr, uint32_t ucAddr, uint8_t *pucData, uint32_t ulCount)
{
uint32_t ulToWrite;
MAP_I2CMasterSlaveAddrSet(I2C2_BASE, fm24cl64_addr, false);
ulToWrite = ulCount;
MAP_I2CMasterDataPut(I2C2_BASE, ucAddr/256);
MAP_I2CMasterControl(I2C2_BASE, I2C_MASTER_CMD_BURST_SEND_START);
if(!WaitI2CFinished())
{
return(false);
}
MAP_I2CMasterDataPut(I2C2_BASE, ucAddr%256);
MAP_I2CMasterControl(I2C2_BASE, I2C_MASTER_CMD_BURST_SEND_CONT);
if(!WaitI2CFinished())
{
return(false);
}
while(ulToWrite)
{
MAP_I2CMasterDataPut(I2C2_BASE, *pucData++);
if(ulToWrite)
{
MAP_I2CMasterControl(I2C2_BASE,
((ulToWrite == 1) ? I2C_MASTER_CMD_BURST_SEND_FINISH : I2C_MASTER_CMD_BURST_SEND_CONT));
}
if(!WaitI2CFinished())
{
return(false);
}
ulToWrite--;
}
return(true);
}
/*
*********************************************************************************************************
** 函数名称: FM24CL64ReadPolled()
** 函数功能: 向FM24CL64读数据
** 入口参数: pucdata 数据接收缓冲区指针
ulOffset FM25CL64子地址
ulCount 读出的个数
** 出口参数 true 读出成功
false 读出失败
*********************************************************************************************************
*/
bool
FM24CL64Read(uint8_t fm24cl64_addr, uint32_t ulOffset, uint8_t *pucData,
uint32_t ulCount)
{
uint32_t ulToRead;
I2CMasterSlaveAddrSet(I2C2_BASE, fm24cl64_addr, false);
I2CMasterDataPut(I2C2_BASE, ulOffset/256);
I2CMasterControl(I2C2_BASE, I2C_MASTER_CMD_BURST_SEND_START);
if(!WaitI2CFinished())
{
return(false);
}
I2CMasterDataPut(I2C2_BASE, ulOffset%256);
I2CMasterControl(I2C2_BASE, I2C_MASTER_CMD_BURST_SEND_CONT);
if(!WaitI2CFinished())
{
return(false);
}
I2CMasterSlaveAddrSet(I2C2_BASE, fm24cl64_addr, true);
I2CMasterControl(I2C2_BASE,
((ulCount > 1) ? I2C_MASTER_CMD_BURST_RECEIVE_START :
I2C_MASTER_CMD_SINGLE_RECEIVE));
ulToRead = ulCount;
while(ulToRead)
{
if(!WaitI2CFinished())
{
return(false);
}
*pucData++ = I2CMasterDataGet(I2C2_BASE);
ulToRead--;
if(ulToRead)
{
I2CMasterControl(I2C2_BASE,
((ulToRead == 1) ? I2C_MASTER_CMD_BURST_RECEIVE_FINISH : I2C_MASTER_CMD_BURST_RECEIVE_CONT));
}
}
return(true);
}
bool
WaitI2CFinished(void)
{
uint32_t wait_count = 0xffffff;
while(MAP_I2CMasterBusy(I2C2_BASE))
{
if(wait_count == 0)
{
return false;
}
else
{
wait_count--;
}
}
return true;
}
int main()
{
uint8_t pucReadData[6]={0};
uint8_t pucWriteData[6]={0};
uint32_t index = 0;
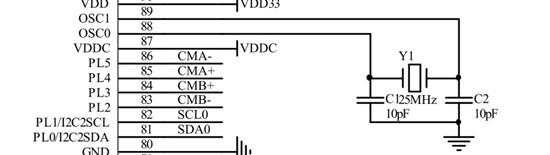
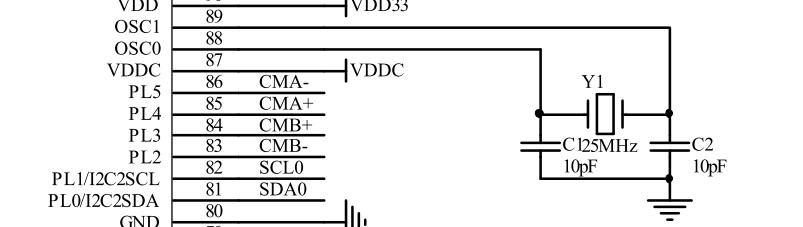
g_ui32SysClock = SysCtlClockFreqSet((SYSCTL_XTAL_25MHZ|SYSCTL_OSC_MAIN| SYSCTL_USE_PLL|SYSCTL_CFG_VCO_480), 120000000);
I2CInit();
for(index=0; index<6; index++)
{
pucWriteData[index] = (0x09+index);
}
while(1)
{
SysCtlDelay(120000);
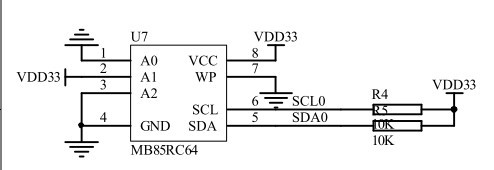
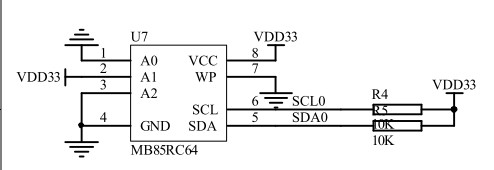
FM24CL64Write(0x52, 0x00,pucWriteData, 3);
SysCtlDelay(12000);
FM24CL64Read(0x52, 0x00, pucReadData,3);
}
}
读写铁电单步调试FM24CL64Write和FM24CL64Read就可以正常读写,全速就不正确,后来经过各种调试发现在WaitI2CFinished函数里面加 SysCtlDelay(10);的延时就正常了,这到底是什么原因啊?是否存在这种bug?
