Part Number: TMS570LS3137
Other Parts Discussed in Thread: HALCOGEN
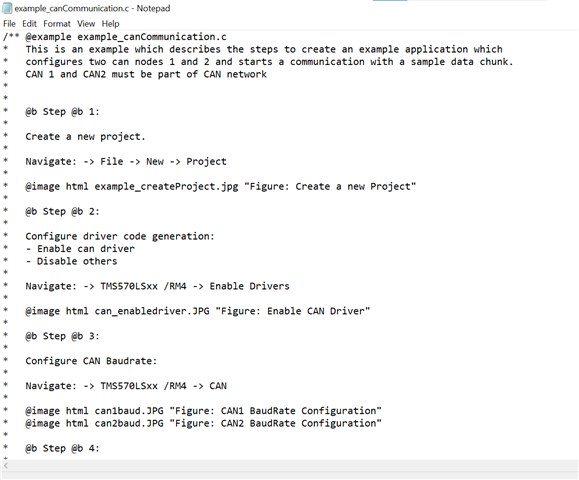
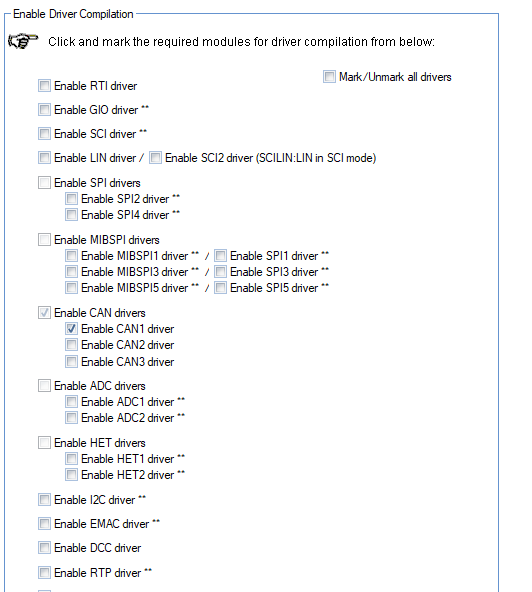
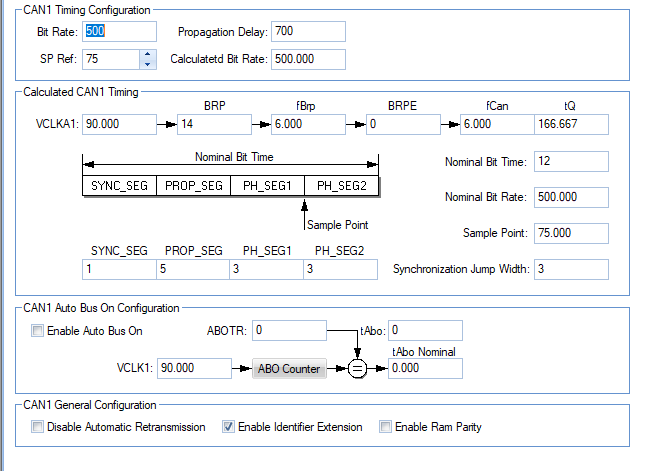
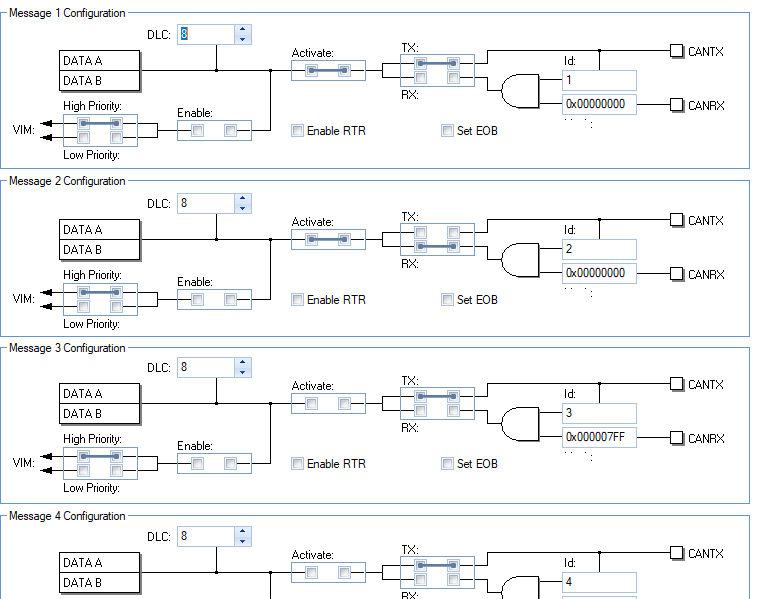
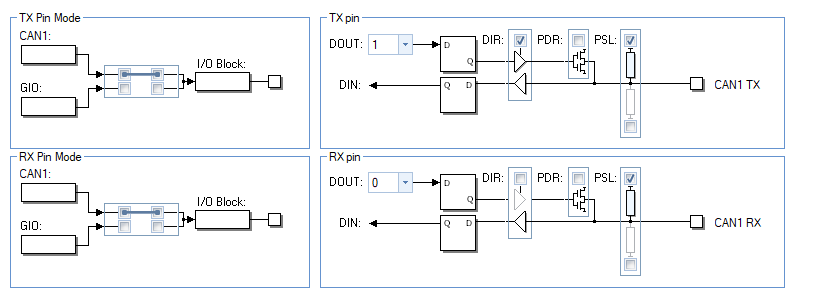
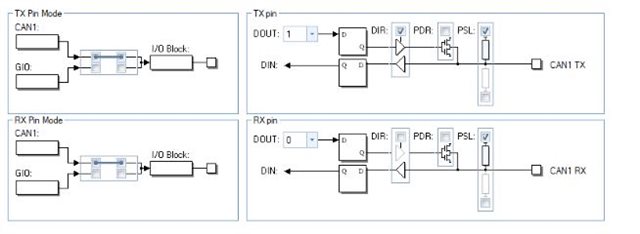
项目代码使用HALCOGEN生成,参考example_canCommunication.c文件,版本04.07.01,CCS版本Version: 8.3.1.00004,配置如下:

调用代码如下:
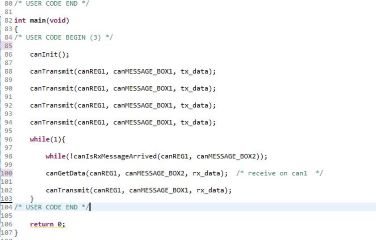
外部CAN工具无法接收到数据,且第二次调用canTransmit函数,直接失败返回
 canInit代码如下:
canInit代码如下:
void canInit(void)
{
/* USER CODE BEGIN (4) */
/* USER CODE END */
/** @b Initialize @b CAN1: */
/** - Setup control register
* - Disable automatic wakeup on bus activity
* - Local power down mode disabled
* - Disable DMA request lines
* - Enable global Interrupt Line 0 and 1
* - Disable debug mode
* - Release from software reset
* - Enable/Disable parity or ECC
* - Enable/Disable auto bus on timer
* - Setup message completion before entering debug state
* - Setup normal operation mode
* - Request write access to the configuration registers
* - Setup automatic retransmission of messages
* - Disable error interrupts
* - Disable status interrupts
* - Enter initialization mode
*/
canREG1->CTL = (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)((uint32)0x00000005U << 10U)
| (uint32)0x00020043U;
/** - Clear all pending error flags and reset current status */
canREG1->ES |= 0xFFFFFFFFU;
/** - Assign interrupt level for messages */
canREG1->INTMUXx[0U] = (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U;
canREG1->INTMUXx[1U] = (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U
| (uint32)0x00000000U;
/** - Setup auto bus on timer period */
canREG1->ABOTR = (uint32)0U;
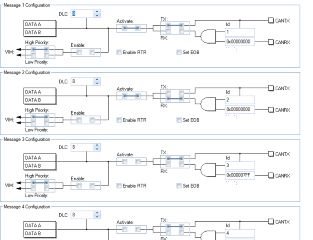
/** - Initialize message 1
* - Wait until IF1 is ready for use
* - Set message mask
* - Set message control word
* - Set message arbitration
* - Set IF1 control byte
* - Set IF1 message number
*/
/*SAFETYMCUSW 28 D MR:NA <APPROVED> "Potentially infinite loop found - Hardware Status check for execution sequence" */
while ((canREG1->IF1STAT & 0x80U) ==0x80U)
{
} /* Wait */
canREG1->IF1MSK = 0xC0000000U | (uint32)((uint32)((uint32)0x00000000U & (uint32)0x1FFFFFFFU) << (uint32)0U);
canREG1->IF1ARB = (uint32)0x80000000U | (uint32)0x40000000U | (uint32)0x20000000U | (uint32)((uint32)((uint32)1U & (uint32)0x1FFFFFFFU) << (uint32)0U);
canREG1->IF1MCTL = 0x00001000U | (uint32)0x00000000U | (uint32)0x00000000U | (uint32)0x00000000U | (uint32)8U;
canREG1->IF1CMD = (uint8) 0xF8U;
canREG1->IF1NO = 1U;
/** - Initialize message 2
* - Wait until IF2 is ready for use
* - Set message mask
* - Set message control word
* - Set message arbitration
* - Set IF2 control byte
* - Set IF2 message number
*/
/*SAFETYMCUSW 28 D MR:NA <APPROVED> "Potentially infinite loop found - Hardware Status check for execution sequence" */
while ((canREG1->IF2STAT & 0x80U) ==0x80U)
{
} /* Wait */
canREG1->IF2MSK = 0xC0000000U | (uint32)((uint32)((uint32)0x00000000U & (uint32)0x1FFFFFFFU) << (uint32)0U);
canREG1->IF2ARB = (uint32)0x80000000U | (uint32)0x40000000U | (uint32)0x00000000U | (uint32)((uint32)((uint32)2U & (uint32)0x1FFFFFFFU) << (uint32)0U);
canREG1->IF2MCTL = 0x00001000U | (uint32)0x00000000U | (uint32)0x00000000U | (uint32)0x00000000U | (uint32)8U;
canREG1->IF2CMD = (uint8) 0xF8U;
canREG1->IF2NO = 2U;
/** - Setup IF1 for data transmission
* - Wait until IF1 is ready for use
* - Set IF1 control byte
*/
/*SAFETYMCUSW 28 D MR:NA <APPROVED> "Potentially infinite loop found - Hardware Status check for execution sequence" */
while ((canREG1->IF1STAT & 0x80U) ==0x80U)
{
} /* Wait */
canREG1->IF1CMD = 0x87U;
/** - Setup IF2 for reading data
* - Wait until IF1 is ready for use
* - Set IF1 control byte
*/
/*SAFETYMCUSW 28 D MR:NA <APPROVED> "Potentially infinite loop found - Hardware Status check for execution sequence" */
while ((canREG1->IF2STAT & 0x80U) ==0x80U)
{
} /* Wait */
canREG1->IF2CMD = 0x17U;
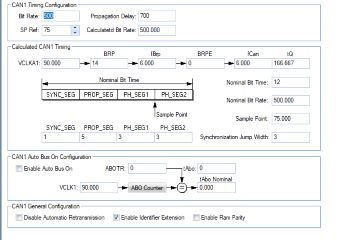
/** - Setup bit timing
* - Setup baud rate prescaler extension
* - Setup TSeg2
* - Setup TSeg1
* - Setup sample jump width
* - Setup baud rate prescaler
*/
canREG1->BTR = (uint32)((uint32)0U << 16U) |
(uint32)((uint32)(3U - 1U) << 12U) |
(uint32)((uint32)((5U + 3U) - 1U) << 8U) |
(uint32)((uint32)(3U - 1U) << 6U) |
(uint32)14U;
/** - CAN1 Port output values */
canREG1->TIOC = (uint32)((uint32)1U << 18U )
| (uint32)((uint32)0U << 17U )
| (uint32)((uint32)0U << 16U )
| (uint32)((uint32)1U << 3U )
| (uint32)((uint32)1U << 2U )
| (uint32)((uint32)1U << 1U );
canREG1->RIOC = (uint32)((uint32)1U << 18U )
| (uint32)((uint32)0U << 17U )
| (uint32)((uint32)0U << 16U )
| (uint32)((uint32)1U << 3U )
| (uint32)((uint32)0U << 2U )
| (uint32)((uint32)0U <<1U );
/** - Leave configuration and initialization mode */
canREG1->CTL &= ~(uint32)(0x00000041U);
/** @note This function has to be called before the driver can be used.\n
* This function has to be executed in privileged mode.\n
*/
/* USER CODE BEGIN (5) */
/* USER CODE END */
}