Part Number: MSPM0G3507
Other Parts Discussed in Thread: DRV8316REVM, , DRV8316
sdk 版本:mspm0_sdk_2_05_01_00
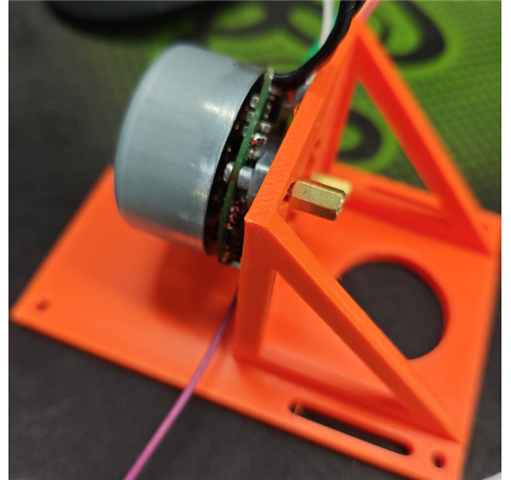
开发板:LP-MSPM0G3507
驱动板:DRV8316REVM
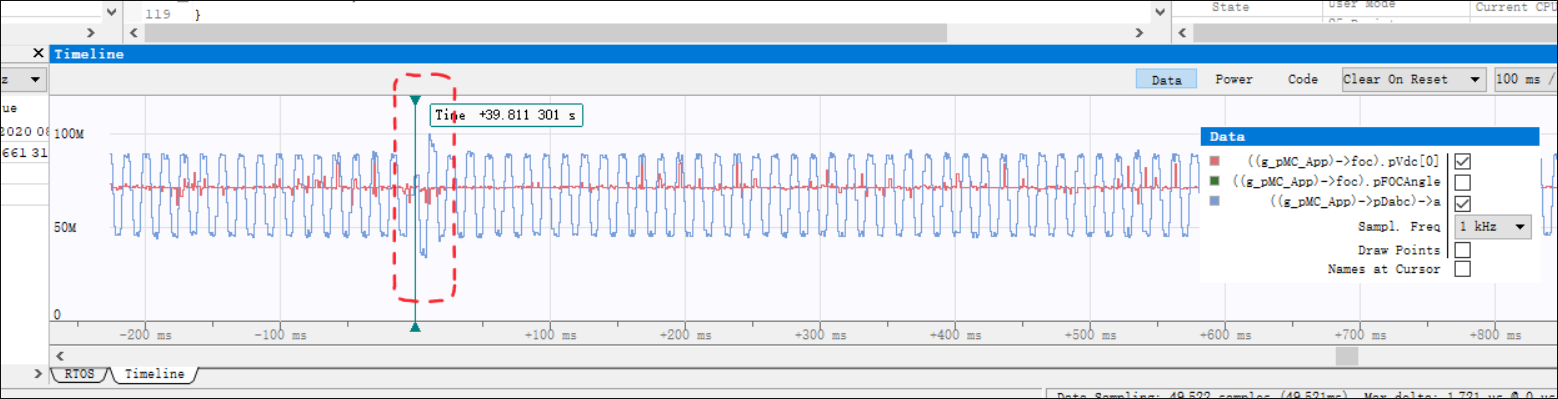
使用 sdk 中的 MSPM0 Universal FOC 例程驱动电机,开环闭环均可转动,但是每间隔 2.4s 电机会跳动一下,通过 Ozone 打印了 Duty 值,发现跳动时 duty 值也会发生畸变,请问这可能是是什么原因。
只在开环运行时也会出现这个情况。
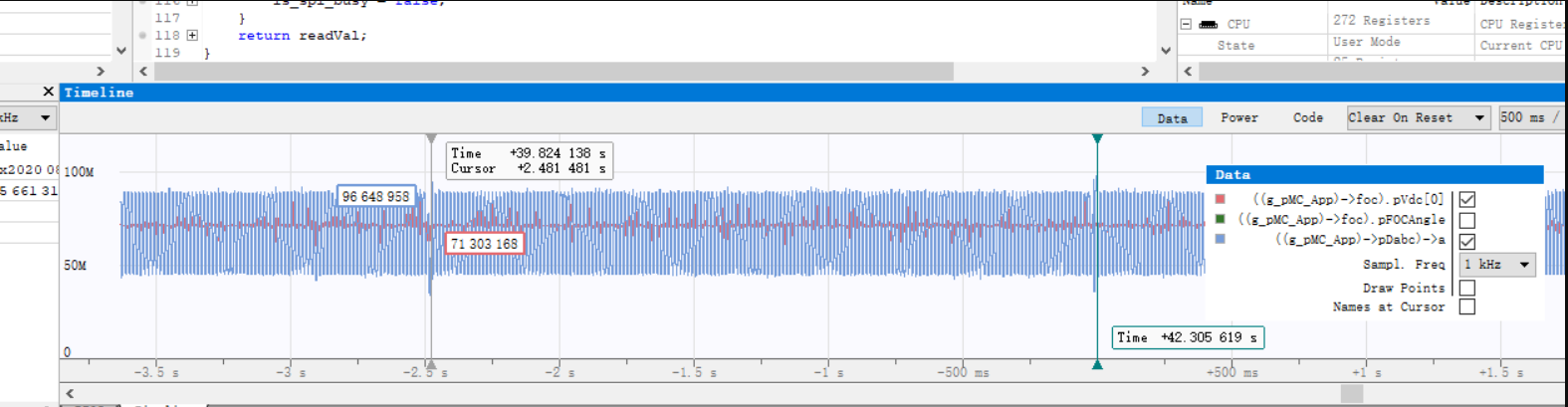
下图是放大后的