Hello everyone, honorable tech team!
I have successfully read the default data of 0X80 address, 7F 40 4D 02, through the datasheet, B1 I am testing to write a little data, after reading the data of 0X80 through I2C, I found that there is no change, it should not be written successfully, please help me to determine where the problem is?


1. I am testing the I2C write data to RRPROM as follows
0XC0 0X50 0X00 0X80 0X20 0X20 0X20 0X20 0X7A
0XA1 is the CRC, I don't know if the CRC is accurate, because the CRC I read is the initial byte FFFF which is the correct 0XBE.
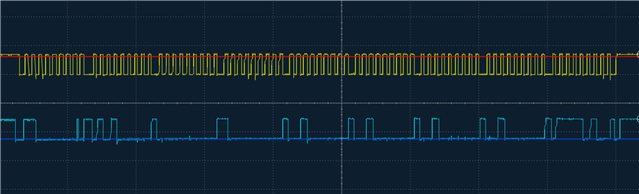
2. Below is my oscilloscope waveform, please help me to determine if it is a control word problem, a program problem, or a CRC problem. Thanks for your help.