

Part Number: DRV8412
HI TI的小伙伴R
背景:
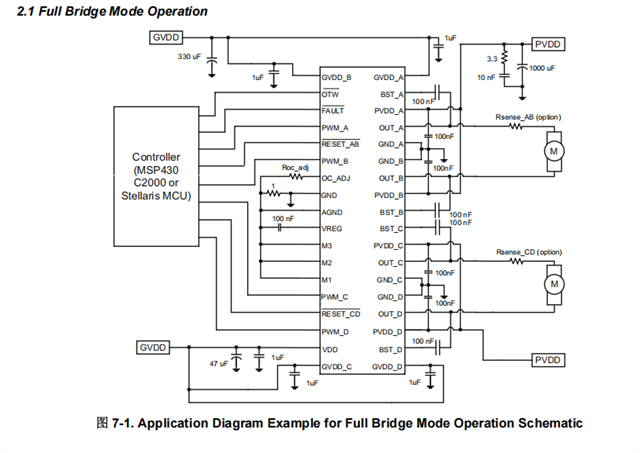
Full Bridge Mode Operation 使用DRV8412驱动2个直流有刷电机且需要控制电机正反转,
问题:
我该如何控制电机正常正反转?OUTA OUB我正常连接了一个正常工作的有刷直流电机,PWM_A和PWM_B Pin脚我需要如何控制?比如OUA—>OUTB时电机定义为正转 时PWM_A和PWM_B是如何控制?
Part Number: DRV8412
HI TI的小伙伴R
背景:
Full Bridge Mode Operation 使用DRV8412驱动2个直流有刷电机且需要控制电机正反转,
问题:
我该如何控制电机正常正反转?OUTA OUB我正常连接了一个正常工作的有刷直流电机,PWM_A和PWM_B Pin脚我需要如何控制?比如OUA—>OUTB时电机定义为正转 时PWM_A和PWM_B是如何控制?

