Part Number: AM623
The test found that the maximum delay between rx and tx in the same cycle of Ethercat is 200us
Expected to control the maximum delay between rx and tx in the same cycle of Ethercat within 50us
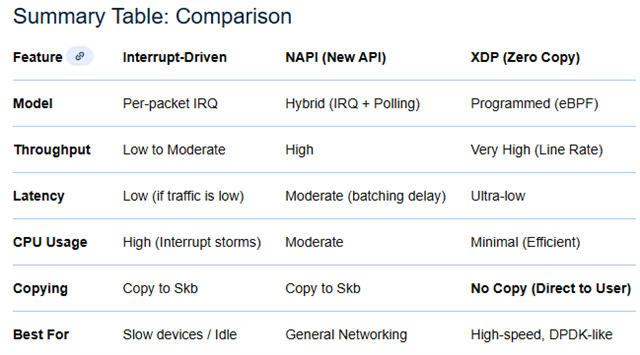
Make modifications in the CPSW driver, and handle Ethercat(0x88A4) and Profinet(0x8892) messages in the interrupt thread.
Ordinary messages use napi framework