

示波器显示的信号如下所示。设备树种配置也如下,请问shi
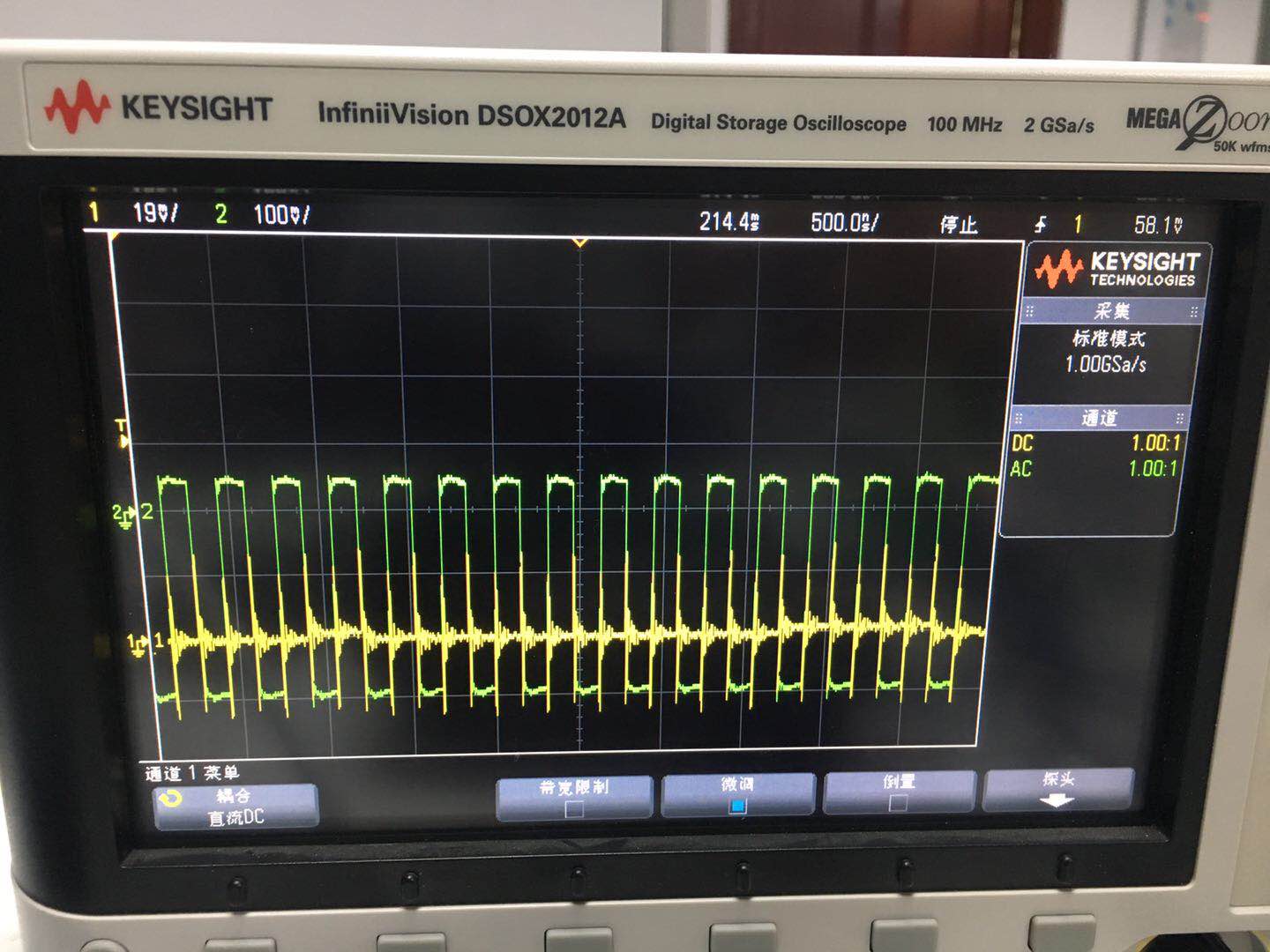
设备树中配置如下:
<spi0_pins_default: spi0_pins_default {
0x150 ( PIN_INPUT | MUX_MODE0 ) /* (P23) spi0_sclk.spi0_sclk */
0x158 ( PIN_INPUT | MUX_MODE0 ) /* (T21) spi0_d1.spi0_d1 */
>;
spi部分设置如下:
<&spi0 {
status = "okay";
pinctrl-names = "default";
pinctrl-0 = <&spi0_pins_default>;
pinctrl-1 = <&spi0_pins_sleep>;
ti,pindir-d0-in-d1-out =<1>; // optional
cs0-gpio = <&gpio0 5 GPIO_ACTIVE_LOW>; /* Bank 0 pin 5 软件控制cs片选*/
/*spidev@0{ /* 将此块注释掉,然后使用的是自己编写的驱动程序 */
status = "okay";
compatible = "rohm,dh2228fv";
spi-max-frequency = <48000000>;
reg =<0x0>;
};*/
adc128@0{
status = "okay";
compatible = "ti,adc128s022-0";
spi-max-frequency = <3200000>;
reg = <0>;
};
……
>
