Part Number: TDA4VM
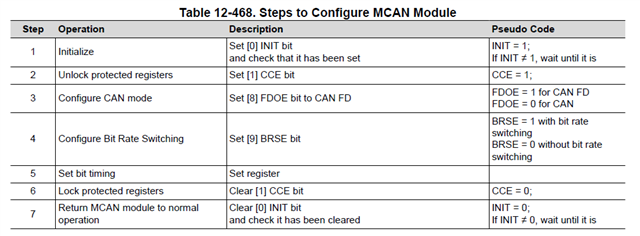
I know the initialization process shown in the figure, and I am not sure about the other register parameters except for the CCE and INIT registers
I have also seen examples :D:\ti-processor-sdk-rtos-j721e-evm-08_04_00_06\mcusw\mcal_drv\mcal,
I can see the logic and process, but I cannot see the parameters in the registers and the operations on the registers when sending information, which makes me confused when developing drivers.
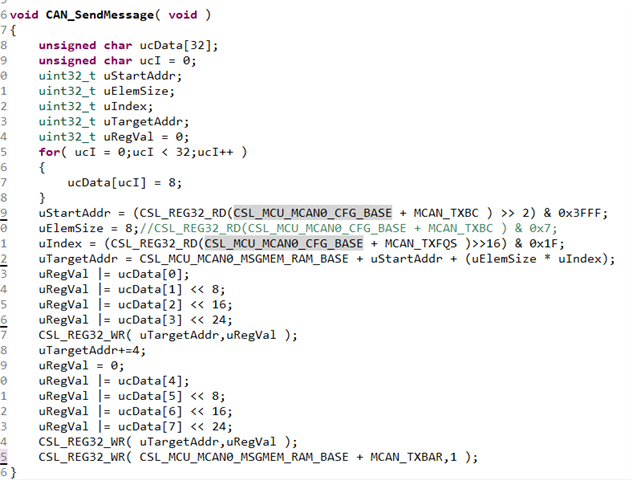
Please provide me with a function to initialize the MCU_MCAN0 register (including register parameters) and a function to send information (including register parameters). I would greatly appreciate it
Also uncertain about the write address of the message to be sent,
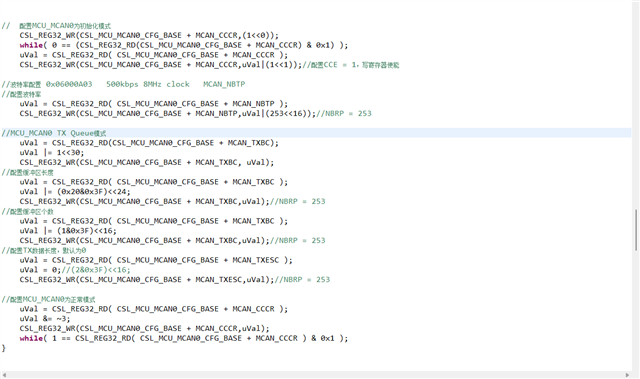
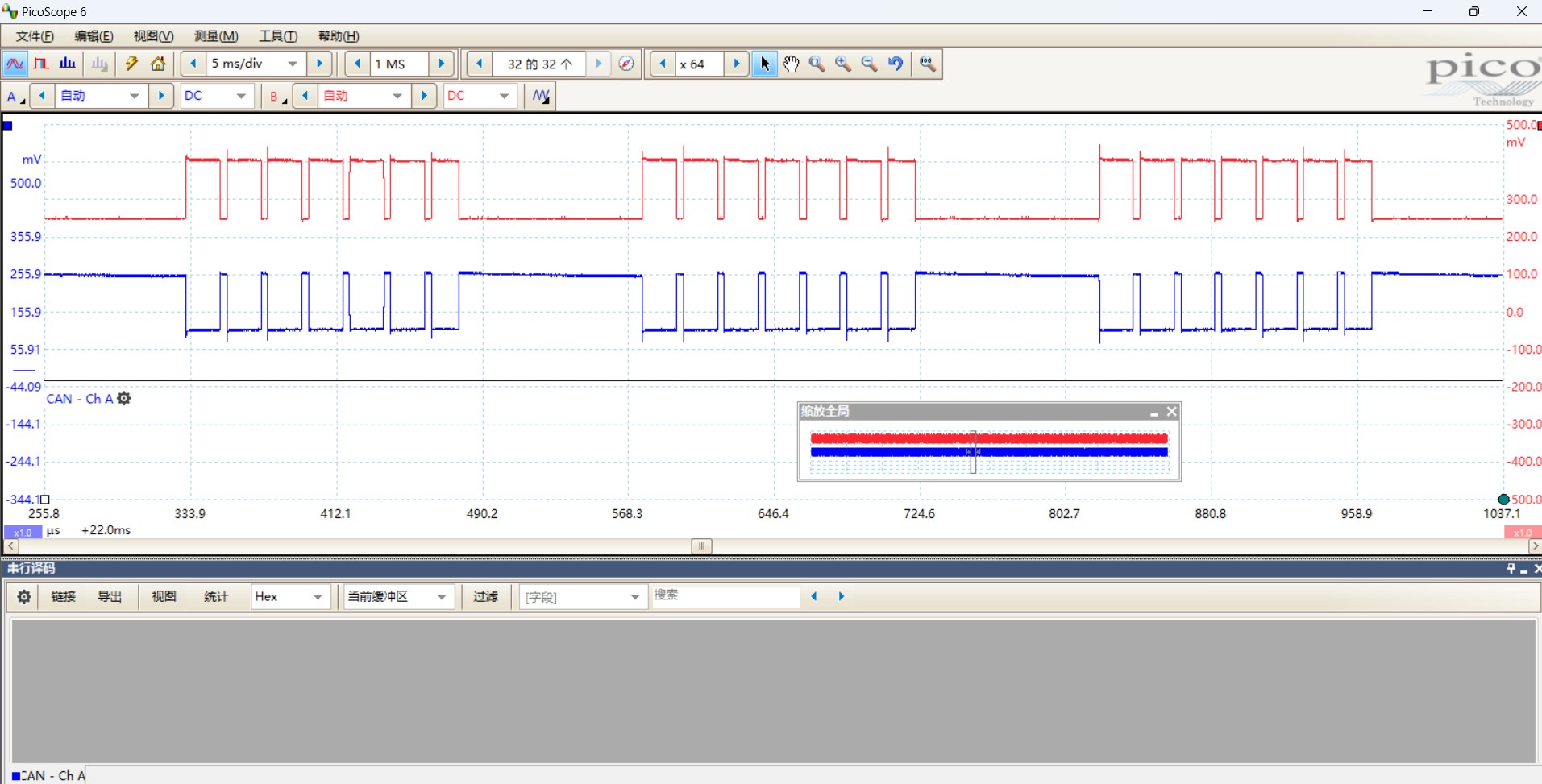
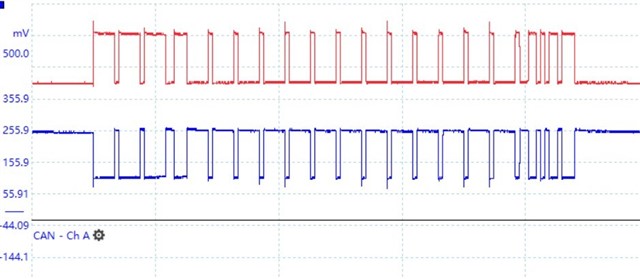
I filled in the register values myself according to my understanding of the manual as shown below, it must be incorrect because I didn't see any waveform changes on J1 MCU_CAN0.