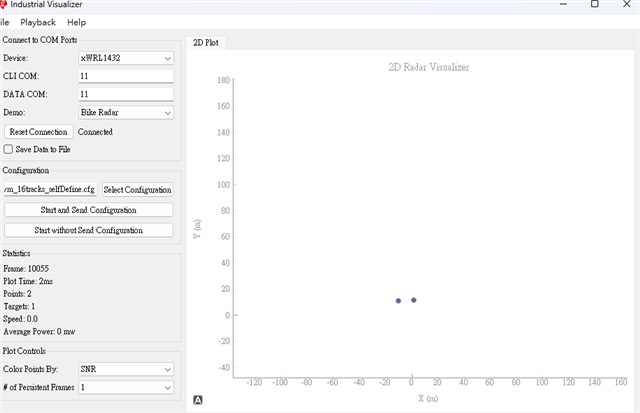
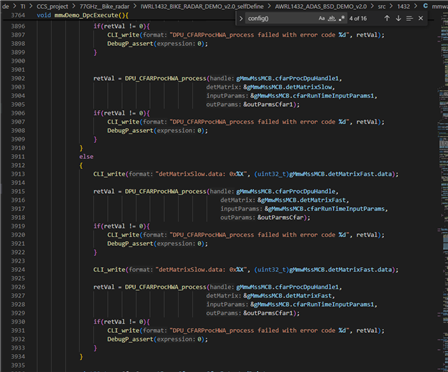
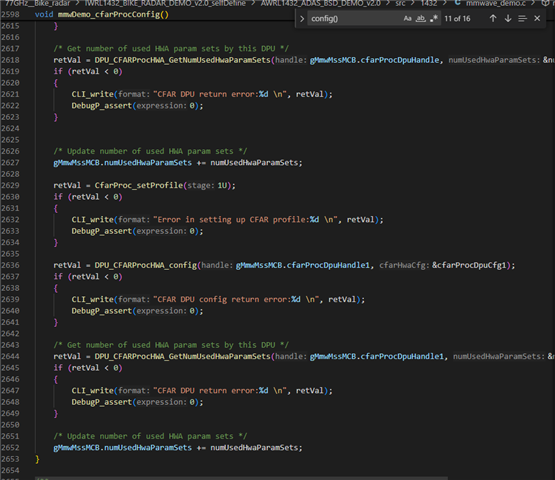
您好,我目前在開發二階段CFAR根據不同的距離使用不同的CFAR參數,但現在遇到一個問題是我已經設定兩組CFAR參數了,並且分兩次實作DPU_CFARProcHWA_process,但我發現我僅有第一次CFAR會產生點雲,第二次的CFAR卻沒有輸出點雲,我想請問我應該怎們處理呢?
您好,我目前在開發二階段CFAR根據不同的距離使用不同的CFAR參數,但現在遇到一個問題是我已經設定兩組CFAR參數了,並且分兩次實作DPU_CFARProcHWA_process,但我發現我僅有第一次CFAR會產生點雲,第二次的CFAR卻沒有輸出點雲,我想請問我應該怎們處理呢?