

Other Parts Discussed in Thread: AWR2243, IWR6843
我希望雷达的最大探测距离可以达到50m。并通过mmWaveSensingEstimator生成了50m探测距离的配置。
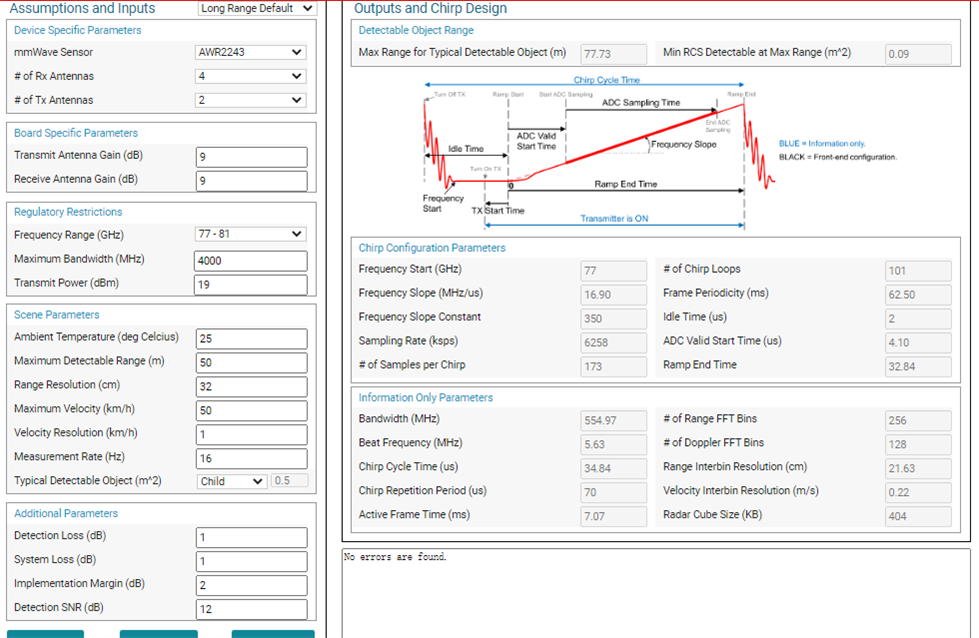
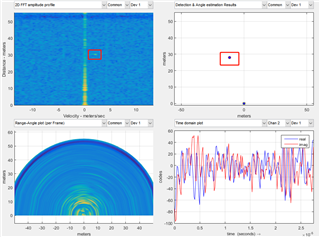
但在实际使用过程中只能检测到30m左右,再远就很难检测到了。mmWave Studio中的结果如下:
距离速度图和距离角度图中,30m之后测试的行人目标,反馈信号就很微弱了。
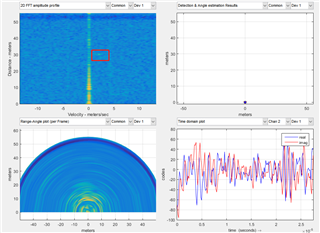
偶尔才能检测到目标:
请问我应该修改哪些参数,以达到50m的探测距离?
Original question:

我希望雷达的最大探测距离可以达到50m。并通过mmWaveSensingEstimator生成了50m探测距离的配置。
但在实际使用过程中只能检测到30m左右,再远就很难检测到了。mmWave Studio中的结果如下:
距离速度图和距离角度图中,30m之后测试的行人目标,反馈信号就很微弱了。
偶尔才能检测到目标:
请问我应该修改哪些参数,以达到50m的探测距离?

