

Part Number: AWR2243
根据实例代码给出的BF模式数据采集的参数配置SMRR,其anglesToSteer=[-30:2:30]; 得到的静态目标的距离-角度图是没有问题的,如下:

但是我修改其anglesToSteer=[-60:1:60]; 采集回来的数据在有些BF角度下距离估计出现了问题(环境没有任何改变),如下:
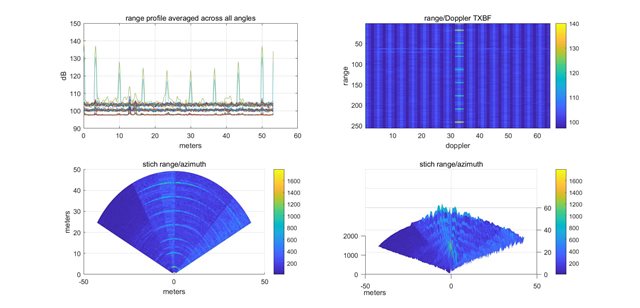
多次采集数据都出现了这种情况。请问我是设置的角度太大了吗?但是我看手册的实验手册中的anglesToSteer=[-60:0.5:60],还是有什么限制条件需要考虑?
