

Part Number: IWR6843ISK-ODS
Other Parts Discussed in Thread: IWR6843ISK, IWR1443BOOST
很抱歉再次打扰,我目前有下列几个问题有疑惑,麻烦您给解答一下,谢谢。
1、我想使用IWR6843ISK-ODS采集人体的点云数据用于人体的行为识别(识别出人在做的几种行为:坐下、下蹲等),设备基本的使用我已经掌握,请问我该使用哪一个demo实现这个功能?如何配置我的cfg文件?以及从哪里读取到这些点云数据?烦请解答一下,谢谢。
2、我之前烧录C:\ti\mmwave_industrial_toolbox_4_5_1\labs\out_of_box_demo\68xx_ods_point_cloud_demo\prebuilt_binaries\xwr64xxODS_mmw_demo.bin后,使用mmWave Demo Visualizer配置如下图1和图2,将tuned profile导出后,替换掉ROS系统中的原来配置文件,使用roslaunch ti_mmwave_rospkg 6843_multi_3d_0.launch命令运行,在弹出的Rviz可视化工具中能看到点云数据,并且使用rostopic echo /ti_mmwave/radar_scan命令查看雷达所发布的topic信息(见图3),只有xyz三维坐标和速度属性有取值,剩下的属性是没有值的,请问是雷达没有提供这几个值呢?还是需要我去在哪里做一些修改能够获取到这些值?麻烦您告知我一下,谢谢。
3、接第2个问题的使用场景下,我能够拿到的点云中点的个数很少,通常每帧数据在8个点之下,而我希望得到每帧15个点以上,请问我是只能通过降低CFAR值来提高点数吗?这样做会不会导致新加进来的点都是噪声点呢?会有其他更好的解决方法吗?
4、使用ROS系统运行demo拿到的数据与在windows上使用TI官方提供的Visualizer所捕获到的数据是一样的吗?
图1
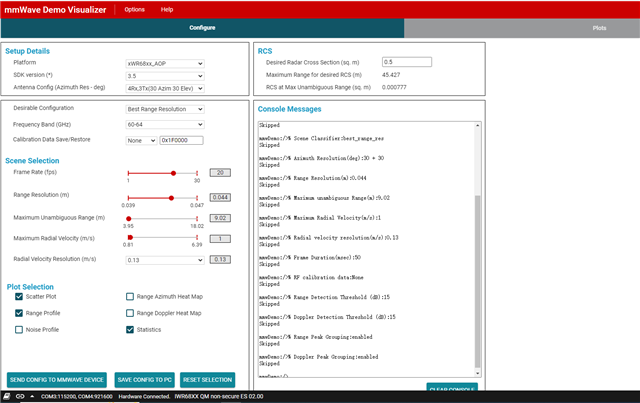
图2
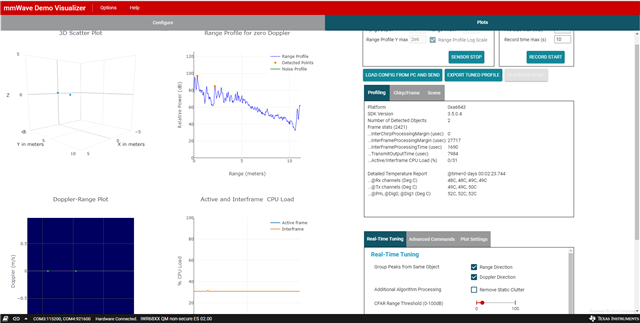
图3


