

如下所示:这个是通过help ar1.SetPerChirpPhaseShifterConfig_mult得到的结果,请问最后三排phase shifter value的单位是什么呀?是弧度制还是角度值?还是其他的值?谢谢!
Int32 ar1.SetPerChirpPhaseShifterConfig_mult(UInt16 RadarDeviceId, UInt16 ChirpStartIndex, UInt16 ChirpEndIndex, UInt16 Tx0PhaseShifter, UInt16 Tx1PhaseShifter, UInt16 Tx2PhaseShifter) - SetPerChirpPhaseShifterConfig API Defines static phase configurations per chirp in each of the TXs Channels.
_I_ UInt16 RadarDeviceId - Radar Device Id
_I_ UInt16 ChirpStartIndex - Start Index of the chirp for configuring the phase shifter
_I_ UInt16 ChirpEndIndex - End Index of the chirp for configuring phase shifter
_I_ UInt16 Tx0PhaseShifter - TX0 phase shifter value
_I_ UInt16 Tx1PhaseShifter - TX1 phase shifter value
_I_ UInt16 Tx2PhaseShifter - TX2 phase shifter value


 这是我使用这个API的lua代码,但是有报错
这是我使用这个API的lua代码,但是有报错 这个是报错结果,给的理由是Failed, Error Type: API IS ISSUED FOR AN UNSUPPORTED DEVICE。请问这是什么原因呢?
这个是报错结果,给的理由是Failed, Error Type: API IS ISSUED FOR AN UNSUPPORTED DEVICE。请问这是什么原因呢?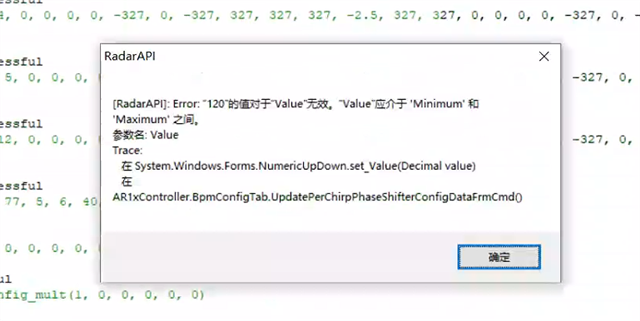 显示是这个错误,那是不是代表这个取值范围不是0-360呢?
显示是这个错误,那是不是代表这个取值范围不是0-360呢?