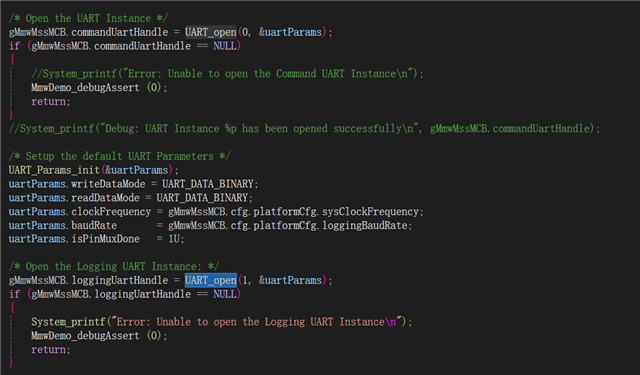
您好,我们现在自制了一块1843板子,直接利用usb to ttl连接pc与雷达板串口的TX/RX,现在雷达板可以正常烧写程序,程序采用SDK 03_05_00_01的out box of demo,但调试发现数据的收发有些问题,原来的雷达板是有一个cfg和一个data口,但这样连接pc设备上只会显示一个usb serial口,请问我应该如何调整代码,使得数据能够通过这个串口收发
您好,我们现在自制了一块1843板子,直接利用usb to ttl连接pc与雷达板串口的TX/RX,现在雷达板可以正常烧写程序,程序采用SDK 03_05_00_01的out box of demo,但调试发现数据的收发有些问题,原来的雷达板是有一个cfg和一个data口,但这样连接pc设备上只会显示一个usb serial口,请问我应该如何调整代码,使得数据能够通过这个串口收发