

Other Parts Discussed in Thread: DCA1000EVM
我們使用了 IWR6843ODS + ICBOOST + DCA1000EVM 來採集場景中的移動人體位置,但是我們發現在場景中僅有一人,且人站在雷達正前方走動(相對雷達位置為 x = 0, 在 y = [ 1.55, 5.15 ] 之間來回直線走動)時,mmWave Studio 中的 Postprocessing 可視化工具中的 Detection & Angle estimation Results 產生出的角度卻有兩個(應該非反射問題,測試場景在戶外,雷達距離左邊牆壁有4.2公尺、右邊扶手有3.6公尺,雷達前方為空地,距離前方建築應超過10公尺),附上發生此問題的影片連結:https://youtu.be/R05jDowhOBE
另外一個測試則是人站在雷達的右邊(相對雷達位置為 x = 1.8, 在 y = [ 1.55, 5.15 ] 之間來回直線走動)時,會發生 Detection & Angle estimation Results 產生出的位置是斜的(座標會在 ( 2, 1 ) 和 ( 4, 4) 之間來回),測試場景同上敘述,附上發生此問題的影片連結:https://youtu.be/wb4KEDlmnEY
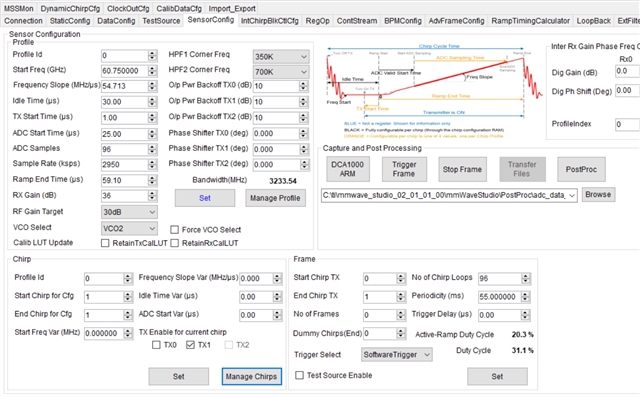
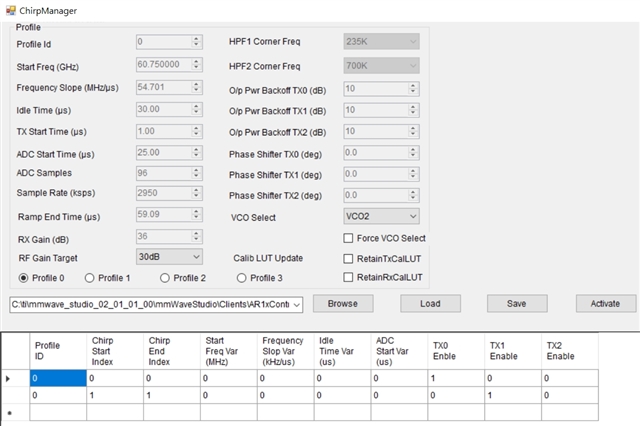
試想過可能是因為 mmWave Studio 中未考慮到 IWR6843ODS 之虛擬天線陣列排列,所以改用 IWR6843ODS 之其中一組 Azimuth 的 ULA 來做測試(mmWave Studio 中 Enable Tx0 Tx1 Rx0 Rx3,保留 IWR6843ODS 虛擬天線陣列圖之 TX1-RX1, TX1-RX4, TX2-RX1, TX2-RX4),但這樣嘗試後發現人站在雷達正前方走動(相對雷達位置為 x = 0, 在 y = [ 1.55, 5.15 ] 之間來回直線走動)時,Detection & Angle estimation Results 產生結果變成有3個方向,測試場景同上敘述,附上發生此問題的影片連結:https://youtu.be/Fv2bAmdigWk
以下為改用 IWR6843ODS 之其中一組 Azimuth 的 ULA 來做測試之設定: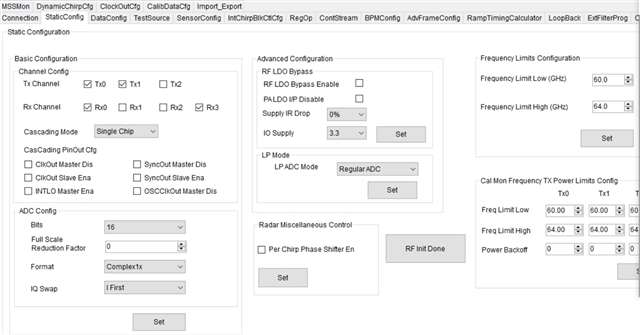
目前我在做以 DCA1000EVM 錄製之 bin file 解析成 3D 座標系點雲,但轉換成點雲後的目標狀況一直很不理想,所以想先在mmWave Studio中查看 TI 以 DCA1000EVM bin file 解析後可視化的點雲會有的樣子,但發現在mmWave Studio 中產生的 Detection & Angle estimation Results 似乎有點奇怪,想請問為什麼會發生這樣的情況? mmWave Studio 中處理 bin file 之 matlab 程式是可供參考的嗎?
