If you have a related question, please click the "Ask a related question" button in the top right corner. The newly created question will be automatically linked to this question.
- This release can be used on all CC2640 silicon versions. By default, all projects are configured to support only silicon produced in February 2015 or later. However, it is possible to build software which supports all (including pre-release) silicon at the expense of flash space and power consumption.
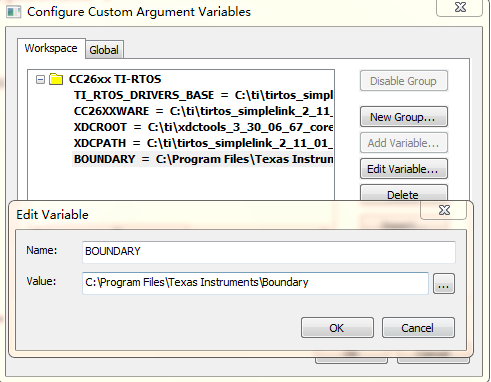
- To support all silicon, change the CC26XXWARE argument variable path to C:\ti\tirtos_simplelink_2_11_01_09\products\cc26xxware_2_00_xx_yyyy
- To support silicon produced in February 2015 or later only (as is the default configuration), change the CC26XXWARE argument variable path to C:\ti\tirtos_simplelink_2_11_01_09\products\cc26xxware_2_20_xx_yyyy







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}