
 模拟
模拟 汽车
汽车 DLP® 技术
DLP® 技术 嵌入式处理
嵌入式处理 工业
工业 电源管理
电源管理
是的,电源的确非常重要 —— 那笔者还能做些什么呢?
笔者的上一篇文章说明了电源变化和噪声会对模数转换器(ADC)性能产生的影响。幸好您的数据采集系统并非注定如此。这里有四种您可采取的措施,能确保您的ADC不太容易受到电源变化和噪声的影响。
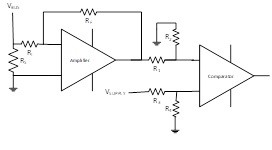
1.选择具有良好电源抑制比(PSRR)的ADC。当然,使您的系统性能免受其电源影响的最佳方法是选择具有足够PSRR的ADC来开始工作。如果您所选择的ADC不能完全满足您的PSRR需求,那么您可在自己原来的开关电源后加一个高PSRR的低压差稳压器(LDO)以提高系统的PSRR。这将有助于清除任何剩余的纹波,并直接增加整个系统的PSRR。请看一下高PSRR的LDO,如电压为3V至36V、电流为150mA的超低噪声TPS7A4901。
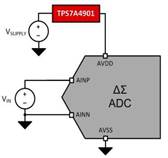
图1:为改善电源抑制状况而添加的TPS7A4901
2.适当的去耦和滤波。电源去耦通常发生在系统中的两个位置点:在供电源处和设备电源引脚处…

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}