
Other Parts Discussed in Thread: CONTROLSUITE, TMS320F28335
在使用C2000的时候,经常遇到工程师说芯片仿真能够运行,但是单机跑却不能跑起来;或者在调试时,复位芯片 > run,发现程序不能跑起来。这其中的原因主要是没有了解C2000的引导模式设置。另外当我们想通过其他方式去引导芯片启动的时候,往往也需要清楚知道C2000的引导是怎么设置的。因此,在这里跟大家分享一下我对C2000引导模式的理解,希望对各位理解芯片从上电到跑到main这一段芯片运行情况有所帮助。
以C2000 Piccolo系列的引导模式为例,delfino稍微有点区别,concerto系列的引导则更复杂。但理解了Piccolo的引导原理对我们理解后面两个系列的芯片有非常大的帮助。
1.首先我们根据图1来看一下芯片上电后的代码执行流程,当芯片在接收到一个复位信号后,会到0x3FFFC0去复位向量,该复位向量跳到BootROM 0x3FF75C中去执行bootloader的程序,这里主要有initboot, 和SelectBootMode, 以及一些外设引导的函数。SeleteBootMode根据芯片的硬件或软件设置来判断芯片该去哪里寻找程序入口,直接目的是如何找到main,然后执行应用程序。
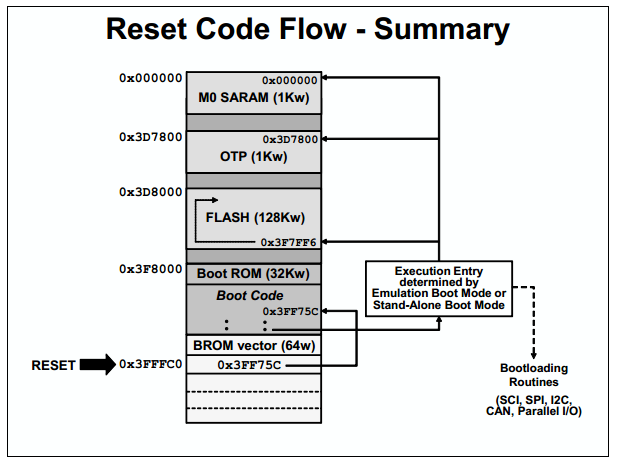
图1. 芯片的复位流程图
我们最常用到的主要有两种引导模式:
一种是boot to RAM,即跳到0x000000的RAM中,去开始执行指令,主要针对程序加载在RAM的仿真模式;另外一种是boot to Flash,则跳到0x3F7FF6中去开始执行代码。
相应的,程序会这两个入口地址0x000000, 0x3F7FF6放一条跳转指令,在codestart.asm源文件中,原因是在Flash的入口地址处只有两个单元的空间,后面是CSM模块,所以需要跳转;而在RAM中之所以也需要跳转,主要是因为在跳转到main之前,需要执行一小段代码_c_int00,该代码会使用0x000003之后的一段RAM,如果代码放在那里,在执行_c_int00之后会损坏代码。
另外就是一些外设引导模式,如SCI引导以及SPI引导等,像我们常使用的C2PROG软件就支持SCI引导,然后通过串口下载程序。
2. 那么芯片的SelectBootMode函数是如何来判断芯片的引导模式(boot mode)呢?
从图2中我们可以看到,首先会判断芯片是否连接仿真器,根据TRST引脚的状态来判断。
如果是仿真器连接,则进入仿真引导(Emulation Boot),这时候芯片的引导主要是靠2个RAM的单元来判断,即EMU_BMODE和EMU_KEY,地址是0xD01和0xD00,所以我们在连接仿真器后,可以首先修改这两个EMU_BMODE和EMU_KEY来设置引导模式;
如果没有连接仿真器,则进入单机跑模式(stand alone), 这时候芯片的引导主要靠GPIO34和GPIO37的状态,以及两个OTP存储单元的值来判断。不过我们经常没有使用OTP这两个单元,用GPIO的状态就已经够了。

图2. 两种状态下的引导模式
3. 仿真器连接时的引导模式配置
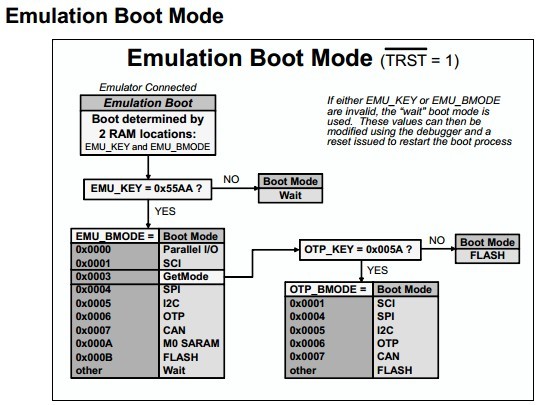
当带仿真器的时候,芯片会根据EMU_BMODE和EMU_KEY这两个单元的值来判断引导模式,比如我们带仿真器最常用的就是引导到RAM,即需要设置EMU_KEY = 0X55AA, EMU_BMODE = 0X000A。当我们在仿真的时候,程序load到Flash的时候,就需要设置EMU_KEY = 0X55AA, EMU_BMODE = 0X000B,如果EMU_BMODE = 0x0003的话,由于我们没有对OTP单元进行操作,即OTP的值为0xFFFF,所以这种情况下也是boot to flash。
在带仿真器跑程序的时候,我们发现即使我们不配置引导模式,程序也能够跑到main,这主要是因为CCS的功能,在程序load到芯片的时候,或是reset > restart,CCS会自动屏蔽bootloader的过程,自动跳到main函数入口。如果我们只选择reset CPU,则需要配置引导模式,即对0x0d01, 0x0d00这两个单元在memory window进行写相应的值,或是在script的菜单中选择引导模式,程序才能够跑到main中。





