

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:MCU-PLUS-SDK-AM263X 您好、TI 专家
我们在 AM263x SDK V8.2中遇到了多 CAN 消息的 MCAN RX ISR 延迟问题
(1)当我们仅为 用 1ms 时间触发任务的 CAN0启用 MCAN_ProcessCanIntraISR (0)时
当接收到200ms 周期消息时、MCAN_ProcessCanIntrISR (0)触发器有延迟问题(200~1000ms)
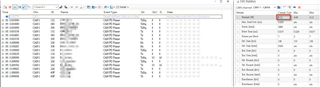
(2) CAN 总线负载(~4%)如下 :
CAN0发送的 CAN ID:0x228和0x504 (CAN 工具中显示 RX)
CAN0接收的其它 CAN ID (TX 显示在 CAN 工具中)、
是否有任何关于 MCAN_ProcessCanIntraISR 用于多 CAN 消息的建议?
BR
Jay
