

请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28388D 主题: SysConfig 中讨论的其他器件
工具/软件:
大家好!
我正在使用 TMS320F28388D 、并正在通过 CAN 总线接收数据。
在轮询模式下、我使用 while 循环成功接收 CAN 消息。
但是、当我将 CAN 外设配置为中断模式时、不会触发接收中断、也不会接收到数据。
为了测试设置、我正在从 Microchip CAN 总线分析仪工具发送 CAN 消息。 在轮询模式下正确接收消息、但在中断模式下不正确接收消息。
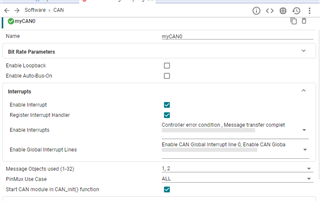
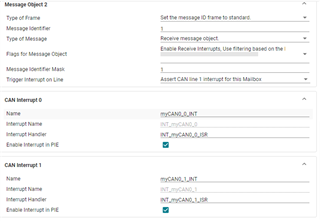
CAN 外设:通过 syscfg 进行配置
测试设置:使用 Microchip CAN 总线分析仪发送消息
观察结果:
轮询模式工作正常(接收到数据)
中断模式无法正常工作:
无中断触发
未收到数据
以下是系统配置的配置
谢谢

