请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28377S 工具/软件:
TI 团队大家好、
我正在使用 TMS320F28377S 并尝试使用建立通信 SPI 模块 。 我已经处理了两天、但一直无法让它正常工作。
SPI 通信函数时被重用 而不对配置进行任何更改 、我可以成功写入和读取数据。
我尝试与之通信的器件是 EEPROM 芯片:25LC640A-E/SN 。 请帮我解决这个问题。
以下是 引脚分配 和 工程 我已经准备好了。
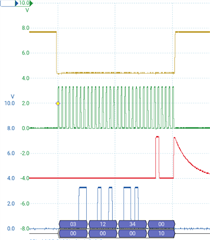
(无法正常工作)
void SPI_GPIO_Init(void)
{
EALLOW;
// === MOSI: GPIO24 → SPISIMOB ===
GpioCtrlRegs.GPAGMUX2.bit.GPIO24 = 1; // Set GPIO24 to use GMUX option 1
GpioCtrlRegs.GPAMUX2.bit.GPIO24 = 2; // Set MUX to 2 for SPISIMOB function
GpioCtrlRegs.GPAQSEL2.bit.GPIO24 = 3;
// === MISO: GPIO25 → SPISOMIB ===
GpioCtrlRegs.GPAGMUX2.bit.GPIO25 = 1; // Set GPIO25 to use GMUX option 1
GpioCtrlRegs.GPAMUX2.bit.GPIO25 = 2; // Set MUX to 2 for SPISOMIB function
GpioCtrlRegs.GPAQSEL2.bit.GPIO25 = 3;
// === CLK: GPIO26 → SPICLKB ===
GpioCtrlRegs.GPAGMUX2.bit.GPIO26 = 1; // Set GPIO26 to use GMUX option 1
GpioCtrlRegs.GPAMUX2.bit.GPIO26 = 2; // Set MUX to 2 for SPICLKB function
GpioCtrlRegs.GPAQSEL2.bit.GPIO26 = 3;
// === Set GPIO directions ===
GpioCtrlRegs.GPADIR.bit.GPIO24 = 1; // MOSI: output
GpioCtrlRegs.GPADIR.bit.GPIO25 = 0; // MISO: input
GpioCtrlRegs.GPADIR.bit.GPIO26 = 1; // CLK: output
// === Enable internal pull-up resistors ===
GpioCtrlRegs.GPAPUD.bit.GPIO24 = 0; // Enable pull-up for MOSI
GpioCtrlRegs.GPAPUD.bit.GPIO25 = 0; // Enable pull-up for MISO
GpioCtrlRegs.GPAPUD.bit.GPIO26 = 0; // Enable pull-up for CLK
GpioCtrlRegs.GPBMUX1.bit.GPIO38 = 0; // Set GPIO38 to GPIO function
GpioCtrlRegs.GPBDIR.bit.GPIO38 = 1; // Set as output
GpioCtrlRegs.GPBPUD.bit.GPIO38 = 0; // Enable pull-up resistor
GpioDataRegs.GPBSET.bit.GPIO38 = 1; // Set HIGH initially (inactive)
EDIS;
}
void SPI_INIT()
{
EALLOW;
GpioDataRegs.GPBSET.bit.GPIO38 = 1; // nCS HIGH
CpuSysRegs.PCLKCR8.bit.SPI_B = 1;
SpibRegs.SPICCR.bit.SPISWRESET = 0; // Reset SPI
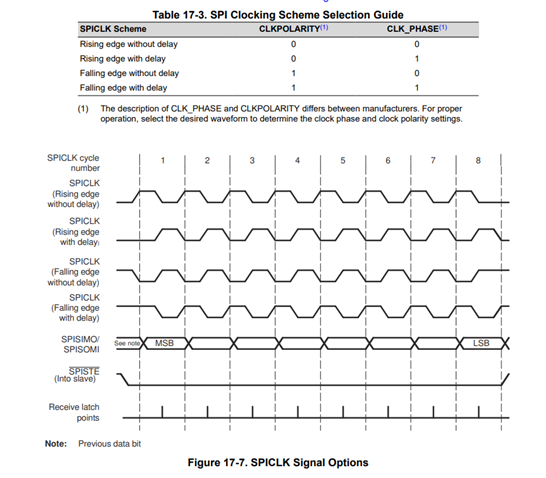
SpibRegs.SPICCR.bit.CLKPOLARITY = 0; // Clock polarity 0
SpibRegs.SPICTL.bit.CLK_PHASE = 0 ;
SpibRegs.SPICCR.bit.SPICHAR = 7; // 8-bit data
SpibRegs.SPICTL.bit.MASTER_SLAVE = 1; // Master mode
SpibRegs.SPICTL.bit.TALK = 1; // TX enable
SpibRegs.SPIBRR.bit.SPI_BIT_RATE = 21; // Baud Rate
SpibRegs.SPICCR.bit.SPISWRESET = 1; // Release SPI from reset
EDIS;
}
void EEPROM_WriteByte(Uint16 address, Uint8 data)
{
// Write Enable
GpioDataRegs.GPBCLEAR.bit.GPIO38 = 1; // nCS LOW
SPIB_SendByte(0x06); // Write Enable opcode
GpioDataRegs.GPBSET.bit.GPIO38 = 1; // nCS HIGH
// Write Command
SPI_Delay();
GpioDataRegs.GPBCLEAR.bit.GPIO38 = 1;
SPIB_SendByte(0x02); // WRITE opcode
SPIB_SendByte((address >> 8) & 0xFF); // Address High Byte
SPIB_SendByte(address & 0xFF); // Address Low Byte
SPIB_SendByte(data); // Data byte
GpioDataRegs.GPBSET.bit.GPIO38 = 1;
DELAY_US(5000); // Wait write cycle (max 5ms)
}
Uint8 EEPROM_ReadByte(Uint16 address)
{
Uint8 value;
GpioDataRegs.GPBCLEAR.bit.GPIO38 = 1;
SPIB_SendByte(0x03); // READ opcode
SPIB_SendByte((address >> 8) & 0xFF); // Address High Byte
SPIB_SendByte(address & 0xFF); // Address Low Byte
value = SPIB_SendByte(0x00); // Dummy write to receive data
DELAY_US(5);
GpioDataRegs.GPBSET.bit.GPIO38 = 1;
return value;
}
Uint16 SPIB_SendByte(Uint16 data)
{
while (SpibRegs.SPISTS.bit.BUFFULL_FLAG == 1); // Wait if TX buffer full
SpibRegs.SPITXBUF = data << 8;
while (SpibRegs.SPISTS.bit.INT_FLAG == 0); // Wait for RX
return SpibRegs.SPIRXBUF & 0x00FF;
}
void SPI_Delay(void)
{
asm(" RPT #50 || NOP");
}
在主环路中进行测试
void main(void)
{
for(;;)
{
if(spi_write_test==1)
{
EEPROM_WriteByte(0x1234, 0xAA);
spi_write_test=0;
}
if(spi_read_test==1)
{
EEPROM_ReadByte(0x1234);
spi_read_test=0;
}
}
}
时钟频率--> 750kHz
写入序列
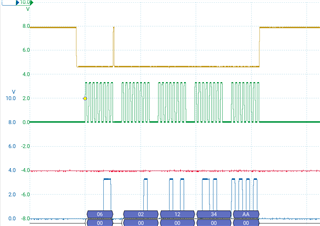
读取序列
(功能)
void SPI_GPIO_Init(void)
{
EALLOW;
// MOSI (Master Out, Slave In) -> GPIO24
GpioCtrlRegs.GPAMUX2.bit.GPIO24 = 0; // Set as GPIO
GpioCtrlRegs.GPADIR.bit.GPIO24 = 1; // Configure as output
// MISO (Master In, Slave Out) -> GPIO25
GpioCtrlRegs.GPAMUX2.bit.GPIO25 = 0; // Set as GPIO
GpioCtrlRegs.GPADIR.bit.GPIO25 = 0; // Configure as input
// CLK (Clock) -> GPIO26
GpioCtrlRegs.GPAMUX2.bit.GPIO26 = 0; // Set as GPIO
GpioCtrlRegs.GPADIR.bit.GPIO26 = 1; // Configure as output
// CS (Chip Select) -> GPIO38
GpioCtrlRegs.GPBMUX1.bit.GPIO38 = 0; // Set as GPIO
GpioCtrlRegs.GPBDIR.bit.GPIO38 = 1; // Configure as output
EDIS;
}
void SPI_Delay(void)
{
asm(" RPT #50 || NOP"); // Short delay between clock transitions
}
void SPI_SendByte(uint8_t data)
{
int i;
for (i = 7; i >= 0; i--)
{
if ((data >> i) & 0x01)
GpioDataRegs.GPASET.bit.GPIO24 = 1; // MOSI high
else
GpioDataRegs.GPACLEAR.bit.GPIO24 = 1; // MOSI low
SPI_Delay();
GpioDataRegs.GPASET.bit.GPIO26 = 1; // CLK high
SPI_Delay();
GpioDataRegs.GPACLEAR.bit.GPIO26 = 1; // CLK low
SPI_Delay();
}
}
uint8_t SPI_ReadByte(void)
{
int i;
uint8_t received = 0;
for (i = 7; i >= 0; i--)
{
// Dummy 0 bit on MOSI
GpioDataRegs.GPACLEAR.bit.GPIO24 = 1;
SPI_Delay();
GpioDataRegs.GPASET.bit.GPIO26 = 1; // CLK high
SPI_Delay();
// Sample MISO
if (GpioDataRegs.GPADAT.bit.GPIO25)
received |= (1 << i);
GpioDataRegs.GPACLEAR.bit.GPIO26 = 1; // CLK low
SPI_Delay();
}
return received;
}
void EEPROM_Write_0x1234_0x10(void)
{
// Step 1: Send WREN command (Write Enable)
GpioDataRegs.GPBCLEAR.bit.GPIO38 = 1; // CS low
SPI_SendByte(0x06); // WREN command
GpioDataRegs.GPBSET.bit.GPIO38 = 1; // CS high
SPI_Delay(); // Small delay if needed
// Step 2: Send WRITE command + Address + Data
GpioDataRegs.GPBCLEAR.bit.GPIO38 = 1; // CS low
SPI_SendByte(0x02); // WRITE command
SPI_SendByte(0x12); // Address MSB (0x12 for 0x1234)
SPI_SendByte(0x34); // Address LSB (0x34 for 0x1234)
SPI_SendByte(0xAA); // Data byte (0x10)
GpioDataRegs.GPBSET.bit.GPIO38 = 1; // CS high
// Step 3: Wait for write cycle to complete (typical 5ms)
DELAY_US(5000); // 5 milliseconds wait
}
uint8_t EEPROM_Read_0x1234(void)
{
uint8_t read_data;
GpioDataRegs.GPBCLEAR.bit.GPIO38 = 1; // CS low - start communication
SPI_SendByte(0x03); // READ command
SPI_SendByte(0x12); // Address MSB
SPI_SendByte(0x40); // Address LSB
read_data = SPI_ReadByte(); // Read one byte
GpioDataRegs.GPBSET.bit.GPIO38 = 1; // CS high - end communication
return read_data;
}
主环路
void main(void)
{
for(;;)
{
if(spi_write_test==1)
{
EEPROM_Write_0x1234_0x10();
spi_write_test=0;
}
if(spi_read_test==1)
{
EEPROM_Read_0x1234();
spi_read_test=0;
}
}
}
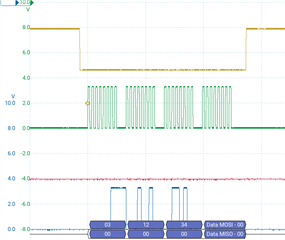
写入

读取
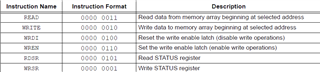
EEPROM 器件命令表