Other Parts Discussed in Thread: DRV8353
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F2800157 主题:DRV8353中讨论的其他器件
工具/软件:
您好团队:
我正在构建级别4下、正在使用 ENOCDER 估算器方法来实现扭矩控制模式。
在此活动中、我将 DRV8353 EVM 与 F2800157 LaunchPad 和24V 编码器电机搭配使用。
我们能够在所有构建级别中以速度控制模式运行电机、并且能够在速度控制模式下实现最大速度。
首先、我将构建级别3视为扭矩控制模式、但在我的一个 E2E 问题中、他们提到这只是电流闭环、而不是扭矩控制模式。
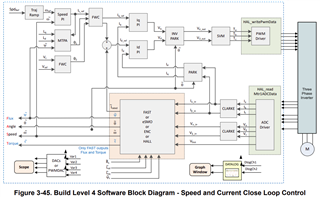
在速度控制模式下、我们需要速度、并根据向模块注入的 Id 和 Iq 电流来实现该速度、如下面的方框图所示。
1、如我所知、在扭矩控制模式下、应该注入 Id 和 Iq 电流、根据这个电机转速相应增加。 这是正确的扭矩控制模式吗?
2.如果有任何关于在编码器或霍尔估算器方法下实现扭矩控制模式的文档,请提供相同的或请在构建级别4中说明如何实现。
3.我们能否在车辆级别使用速度控制模式? 如果是、请提及如何在较低 RPM 的速度控制模式下实现最大扭矩、因为在速度模式下、我们会根据速度注入 Id 和 Iq 电流。 我们的要求是 MCU 应立即注入电流、以实现启动电机时的扭矩需求。
4、如何在高扭矩区域的速度控制模式下实现突然的 Id 和 Iq 电流需求? 我们能否在速度模式下注入这些电流、而不是根据速度吸收电流。
谢谢您、
此致、
Kirana H P