请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:TMS320F28379D 工具/软件:
您好、
我目前正在 通过 I2C 对24CSM01 EEPROM 进行编程。 您可以在下面找到我的配置和发送/读取函数。 当我读取 EEPROM 的安全寄存器时、首先需要发送带有地址的写入命令、然后向 EEPROM 发送读取命令。 在写入命令时、我不发送停止条件、因为 EEPROM 希望在读取命令时再次出现启动条件。 如果我没有在写入和读取序列之间设置延迟、MCU 只会发送读取命令。 如果我在写入和读取序列之间放置延迟、MCU 会发送写入命令、然后接收所有数据。 我不想在它们之间放置延迟、如何在读取命令之前检查传输是否完成?
void I2C_Init(s_I2C_Handler_t* p_s_I2C_Handler) {
I2C_initController(p_s_I2C_Handler->I2C_BASE_U32, DEVICE_SYSCLK_FREQ, p_s_I2C_Handler->I2C_BAUDRATE_U32, p_s_I2C_Handler->e_I2C_DUTYCYCLE);
I2C_setBitCount(p_s_I2C_Handler->I2C_BASE_U32, p_s_I2C_Handler->e_I2C_BITCOUNT_U32);
I2C_setEmulationMode(p_s_I2C_Handler->I2C_BASE_U32, I2C_EMULATION_FREE_RUN);
}
void I2C_Interrupt_Init(s_I2C_Handler_t* p_s_I2C_Handler, I2C_TxFIFOLevel e_tx_fifolevel, I2C_RxFIFOLevel e_rx_fifolevel) {
I2C_clearInterruptStatus(p_s_I2C_Handler->I2C_BASE_U32, I2C_INT_RXFF | I2C_INT_TXFF);
I2C_setFIFOInterruptLevel(p_s_I2C_Handler->I2C_BASE_U32, e_tx_fifolevel, e_rx_fifolevel);
I2C_enableInterrupt(p_s_I2C_Handler->I2C_BASE_U32, I2C_INT_STOP_CONDITION | I2C_INT_REG_ACCESS_RDY);
}
void I2C_Start(s_I2C_Handler_t* p_s_I2C_Handler) {
I2C_enableModule(p_s_I2C_Handler->I2C_BASE_U32);
}
void I2C_FIFO_Enable(s_I2C_Handler_t* p_s_I2C_Handler) {
I2C_enableFIFO(p_s_I2C_Handler->I2C_BASE_U32);
}
void I2C_FIFO_Disable(s_I2C_Handler_t* p_s_I2C_Handler) {
I2C_disableFIFO(p_s_I2C_Handler->I2C_BASE_U32);
}
void I2C_SendMessage(s_I2C_Handler_t* p_s_I2C_Handler, uint16_t slaveAddress_u16, const uint16_t* p_msgbuffer_u16, uint16_t length_u16) {
uint16_t i2c_message_index_u16 = 0u;
while(I2C_isBusBusy(p_s_I2C_Handler->I2C_BASE_U32)) {
}
I2C_FIFO_Disable(p_s_I2C_Handler);
I2C_FIFO_Enable(p_s_I2C_Handler);
I2C_setTargetAddress(p_s_I2C_Handler->I2C_BASE_U32, slaveAddress_u16);
I2C_setConfig(p_s_I2C_Handler->I2C_BASE_U32, I2C_MASTER_SEND_MODE | p_s_I2C_Handler->e_I2C_ADDRESSMODE);
I2C_setDataCount(p_s_I2C_Handler->I2C_BASE_U32, length_u16);
for(i2c_message_index_u16 = 0u; i2c_message_index_u16 < length_u16; i2c_message_index_u16++) {
I2C_putData(p_s_I2C_Handler->I2C_BASE_U32, p_msgbuffer_u16[i2c_message_index_u16]);
}
I2C_sendStartCondition(p_s_I2C_Handler->I2C_BASE_U32);
}
void I2C_ReadMessage(s_I2C_Handler_t* p_s_I2C_Handler, uint16_t slaveAddress_u16, uint16_t* p_readmsgbuffer_u16, uint16_t length_u16) {
uint16_t i2c_message_index_u16 = 0u;
I2C_FIFO_Disable(p_s_I2C_Handler);
I2C_FIFO_Enable(p_s_I2C_Handler);
I2C_setTargetAddress(p_s_I2C_Handler->I2C_BASE_U32, slaveAddress_u16);
I2C_setConfig(p_s_I2C_Handler->I2C_BASE_U32, I2C_MASTER_RECEIVE_MODE | p_s_I2C_Handler->e_I2C_ADDRESSMODE);
I2C_setDataCount(p_s_I2C_Handler->I2C_BASE_U32, length_u16);
I2C_sendStartCondition(p_s_I2C_Handler->I2C_BASE_U32);
for(i2c_message_index_u16 = 0u; i2c_message_index_u16 < length_u16; i2c_message_index_u16++) {
*(p_readmsgbuffer_u16 + i2c_message_index_u16) = I2C_getData(p_s_I2C_Handler->I2C_BASE_U32);
}
}
void I2C_StopTransmit(s_I2C_Handler_t* p_s_I2C_Handler) {
I2C_sendStopCondition(p_s_I2C_Handler->I2C_BASE_U32);
while(I2C_getStopConditionStatus(p_s_I2C_Handler->I2C_BASE_U32)!=0);
while(I2C_getStatus(p_s_I2C_Handler->I2C_BASE_U32) & I2C_STS_TX_EMPTY != I2C_STS_TX_EMPTY);
I2C_sendStopCondition(p_s_I2C_Handler->I2C_BASE_U32);
}
void I2C_StopReceive(s_I2C_Handler_t* p_s_I2C_Handler) {
I2C_sendStopCondition(p_s_I2C_Handler->I2C_BASE_U32);
while(I2C_getStopConditionStatus(p_s_I2C_Handler->I2C_BASE_U32)!=0);
I2C_sendStopCondition(p_s_I2C_Handler->I2C_BASE_U32);
}
void eeprom24Csm01ReadSecurityRegister(s_I2C_Handler_t* psI2CHandler, const uint16_t hwSlaveAddressU16, const uint16_t addressU16, uint16_t* pdataBufferU16, const uint16_t lengthU16) {
uint16_t writeBufferU16[2u] = {0u};
if(addressU16 > 255u)
writeBufferU16[0] = EEPROM_SECURITY_READ_ADDRESS | 0x01;
else
writeBufferU16[0] = EEPROM_SECURITY_READ_ADDRESS| 0x00;
writeBufferU16[1] = addressU16 & 0xFF;
I2C_SendMessage(psI2CHandler, EEPROM_24CSM01_SECURITY_COMMAND | hwSlaveAddressU16, writeBufferU16, 2u);
// DELAY_US(200);
I2C_ReadMessage(psI2CHandler, EEPROM_24CSM01_SECURITY_COMMAND | hwSlaveAddressU16, pdataBufferU16, lengthU16);
I2C_StopReceive(psI2CHandler);
}
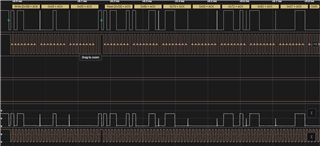
无延迟:

带宽