请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
部件号:TMS320F28379D 主题:C2000WARE 中讨论的其他器件
工具/软件:
尊敬的 Delaney:
感谢您发送编修。 我曾尝试使用 HPI 编译器 pragma、但只有微小的改进。 我是这样做的:
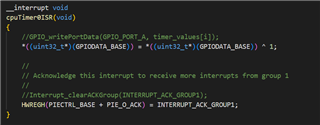
#pragma INTERRUPT (cpuTimer0ISR、HPI);
__ interrupt void cpuTimer0ISR (void)
{
……
……
}
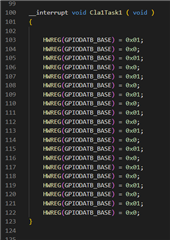
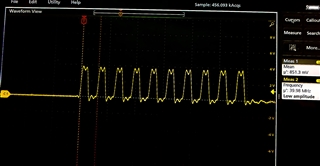
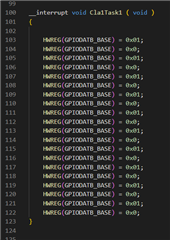
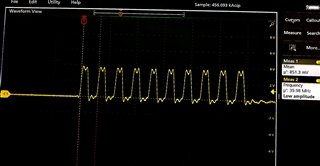
我想到 了使用 CLA 来尝试在 GPIO 中生成 20MHz 频率。 我为 CLA 配置了 1 个任务、其中断源为 Timer0。 我将 Timer0 的 PRD 值保持为 10。 CLA 比 CPU 更快、但仍然只能生成最多 13MHz。 我们至少需要 24MHz。 所以我尝试了一种不同的方法。 我已将 timer0 中断频率降低到 10kHz、因此 CLA 将每 100us 中断一次。 在 CLA 任务中、我在不使用任何循环或 API(直接写入 DAT 寄存器)且无需任何位屏蔽的情况下切换了 GPIO。 这是尽可能快的。 然后、当我在示波器中观察到时、我得到了 40MHz、这足够快、可以满足我们的要求。 但是、我们希望能够控制频率从 12MHz 改变为 24MHz。 我尝试使用 NOPS 来延迟,但我无法做到。 存在一些错误。 您能推荐一种在时钟周期内进行精细延迟调整的方法吗? 我附上了 CLA 任务中代码的屏幕截图和 40MHz 上的示波器输出。
CLA 任务代码:
示波器捕获:
谢谢您、
Bhargav。