请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F280039主题:C2000WARE 中讨论的其他器件
工具/软件:
我们发现总线关闭恢复并触发中断、同时 CAN 总线仍然短缺、固件不进行复位或初始化、想知道什么原因吗?
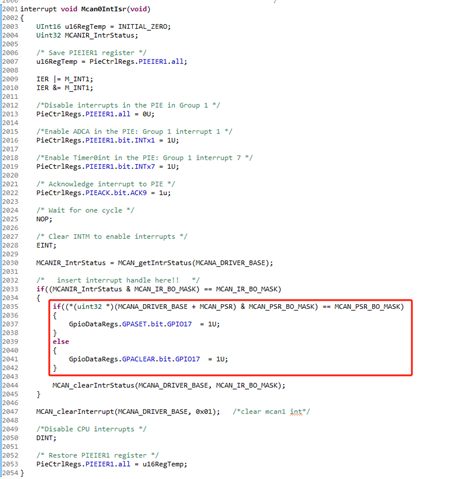
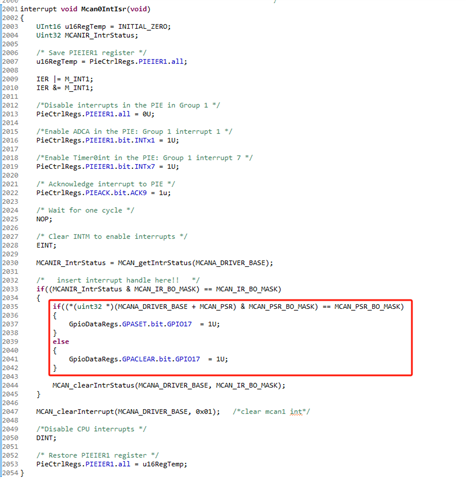
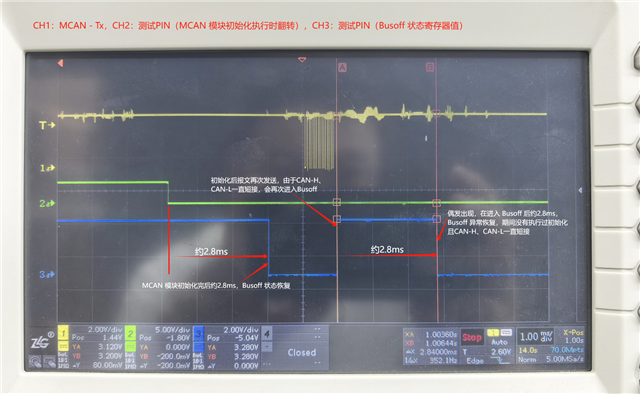
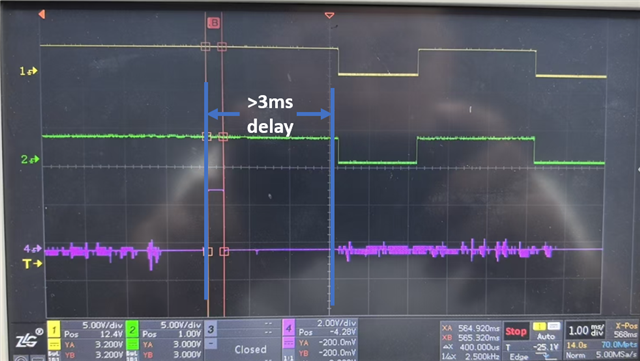
下面是波形、 通道 1 是 CAN-TX、通道 2 是 GPIO、用于指示固件执行 mcan init(从 H 到 L)、通道 3 是 GPIO、以 mcan 中断为单位指示总线关闭状态(可以检查下面的中断代码)
CH-3 为高电平表示总线关闭在开始时设置、然后 CH-2 拉至低电平以执行 mcan init、通道 3 拉至低电平以指示总 线关闭在 2.8ms 后中断时恢复、然后 CAN 总线再次保持短缺、通道 3 在中断时再次拉至高电平以指示总线关闭设置、但是为什么即使 CAN 总线保持短缺、通道 3 也会在 2.8ms 后拉至低电平?