请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:TMS320F28P659DK-Q1工具/软件:
我正在处理的 “single_axis_servo_drive_fcl_QEP_f28p65x"</s>“ 工程。
在最初进行评估时、我选择了 Launch-XL-F28P65X LaunchPad、并使用了具有 169 引脚的 NMR 封装。 对于定制电路板 、我们采用了 TMS320F28P659DK8-Q1、它是 100 引脚型号 (PZP)。
现在、根据 我的理解、如果配置相同、两个控制器的 PWM 输出必须相同。 在这里、我们得到的输出完全相反。
因此、我仅实现了具有 50%占空比的 PWM 配置、以便在两个具有相同配置的硬件上进行测试。
这是 PWM 的配置。
我使用的是加/减计数器、TBCTR==TBPRD 时的中断、
在向上计数期间、当 TBCTR =CMPA 时、输出引脚变为低电平、在 TBCTR =CMPA 时、输出引脚变为高电平。
void configurePWM(void)
{
uint16_t base;
SysCtl_disablePeripheral(SYSCTL_PERIPH_CLK_TBCLKSYNC);
// *****************************************
// Inverter PWM configuration - PWM 1, 2, 3
// *****************************************
for (base = 0; base < 3; base++)
{
// Time Base SubModule Registers
// set Immediate load
EPWM_setPeriodLoadMode(pwmHandle[base], EPWM_PERIOD_DIRECT_LOAD);
EPWM_setTimeBasePeriod(pwmHandle[base], INV_PWM_TICKS / 2);
EPWM_setPhaseShift(pwmHandle[base], 0);
EPWM_setTimeBaseCounter(pwmHandle[base], 0);
EPWM_setTimeBaseCounterMode(pwmHandle[base], EPWM_COUNTER_MODE_UP_DOWN);
EPWM_setClockPrescaler(pwmHandle[base], EPWM_CLOCK_DIVIDER_1,
EPWM_HSCLOCK_DIVIDER_1);
EPWM_disablePhaseShiftLoad(pwmHandle[base]);
// sync "down-stream"
EPWM_enableSyncOutPulseSource(pwmHandle[base],
EPWM_SYNC_OUT_PULSE_ON_CNTR_ZERO);
// Counter Compare Submodule Registers
// set duty 0% initially
EPWM_setCounterCompareValue(pwmHandle[base], EPWM_COUNTER_COMPARE_A, 0);
EPWM_setCounterCompareShadowLoadMode(pwmHandle[base],
EPWM_COUNTER_COMPARE_A,
EPWM_COMP_LOAD_ON_CNTR_ZERO);
)
// Action Qualifier SubModule Registers
EPWM_setActionQualifierActionComplete(
pwmHandle[base],
EPWM_AQ_OUTPUT_A,
(EPWM_ActionQualifierEventAction) (EPWM_AQ_OUTPUT_LOW_UP_CMPA
| EPWM_AQ_OUTPUT_HIGH_DOWN_CMPA));
// Active high complementary PWMs - Set up the deadband
EPWM_setRisingEdgeDeadBandDelayInput(pwmHandle[base],
EPWM_DB_INPUT_EPWMA);
EPWM_setFallingEdgeDeadBandDelayInput(pwmHandle[base],
EPWM_DB_INPUT_EPWMA);
EPWM_setDeadBandDelayMode(pwmHandle[base], EPWM_DB_RED, true);
EPWM_setDeadBandDelayMode(pwmHandle[base], EPWM_DB_FED, true);
EPWM_setDeadBandDelayPolarity(pwmHandle[base], EPWM_DB_RED,
EPWM_DB_POLARITY_ACTIVE_HIGH);
EPWM_setDeadBandDelayPolarity(pwmHandle[base], EPWM_DB_FED,
EPWM_DB_POLARITY_ACTIVE_LOW);
EPWM_setRisingEdgeDelayCount(pwmHandle[base], INV_PWM_DB);
EPWM_setFallingEdgeDelayCount(pwmHandle[base], INV_PWM_DB);
}
// // configure V and W as slaves
EPWM_setSyncInPulseSource(MTR_V_PWM_BASE, PWM_SYNC_SOURCE);
EPWM_enablePhaseShiftLoad(MTR_V_PWM_BASE);
EPWM_setPhaseShift(MTR_V_PWM_BASE, 2);
EPWM_setCountModeAfterSync(MTR_V_PWM_BASE, EPWM_COUNT_MODE_UP_AFTER_SYNC);
EPWM_setSyncInPulseSource(MTR_W_PWM_BASE, PWM_SYNC_SOURCE);
EPWM_enablePhaseShiftLoad(MTR_W_PWM_BASE);
EPWM_setPhaseShift(MTR_W_PWM_BASE, 2);
EPWM_setCountModeAfterSync(MTR_W_PWM_BASE, EPWM_COUNT_MODE_UP_AFTER_SYNC);
SysCtl_disablePeripheral(SYSCTL_PERIPH_CLK_TBCLKSYNC);
return;
}
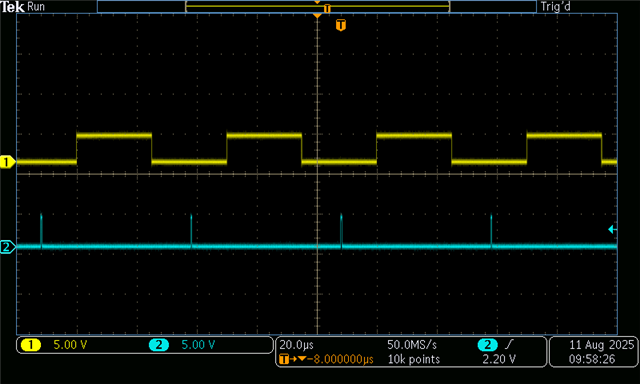
以下是 来自同一配置下两个控制器的探测输出。 黄色


在这里、黄色是占空比为 50%的 EPWMxA、粉色是 GPIO 引脚每 TBCTR=TBPRD 变为高电平、此处的 TBPRD 为 2500。(硬编码用于测试)
从逻辑上讲、定制电路板输出是我想的正确输出。
是否缺少任何配置?
谢谢。此致
Raghu。