Other Parts Discussed in Thread: SFRA, SYSCONFIG
请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:BOOSTXL-BUCKCONV主题中讨论的其他器件:SFRA、 SysConfig
工具/软件:
您好:
我一直按照 TIDU986a 运行实验、并有几个关于 SFRA 的异常情况:
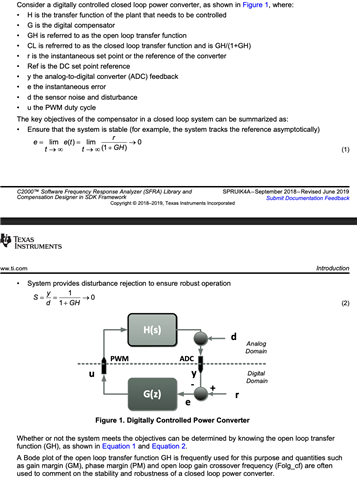
- 受控体与开环模型:
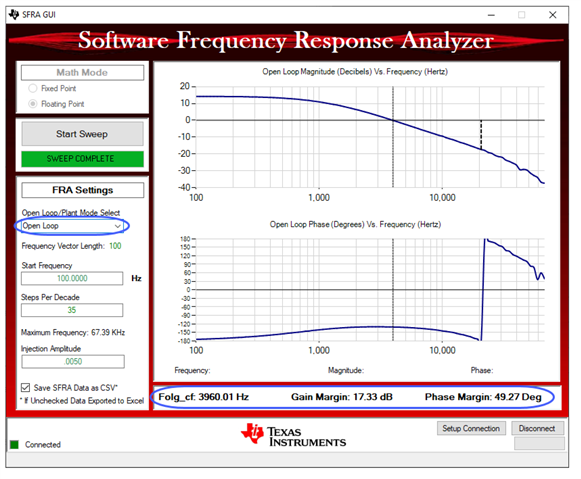
- 当我运行实验 1 时、我会得到 D to Vo 响应。 SFRA 进行的扫描产生了两个结果:开环传递函数和被控对象传递函数。 在该测试背景下、开环传递函数是什么意思? 因为如果 CCM 降压转换器的 D-to-Vo 波特图、结果看起来非常奇怪。 以下是来自实验文档中有关开环传递函数的 SFRA 结果的屏幕截图、相位以接近–180 度的角度开始、这很奇怪。
- 当我观察受控体传递函数时、这似乎更符合我从相位的角度对数输出电压响应的预期。 但是、直流增益值似乎非常低。 输出电压约为 2.3V、I 穿孔的占空比为 30%。 我预计增益为~17dB、但在受控体波特图中、增益约为 1.7。 如果有人能帮助我了解结果、那会很好。
- 我遇到的下一个问题有点奇怪、是当我想看到较低的 ISR 执行速率对我的 D-to-Vo 传递函数的影响时。 我预计控制器执行频率越低、相位滚降的速度就越快、但我发现情况恰恰相反。 以下是在 200kHz 和 33kHz 频率下执行的受控体波特图的比较情况:
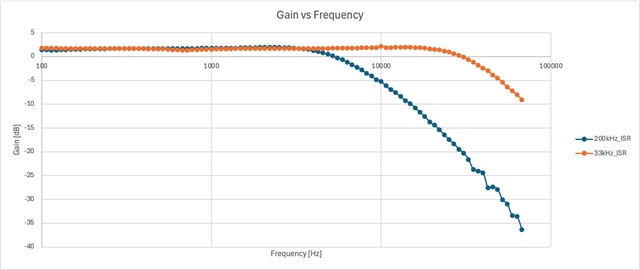
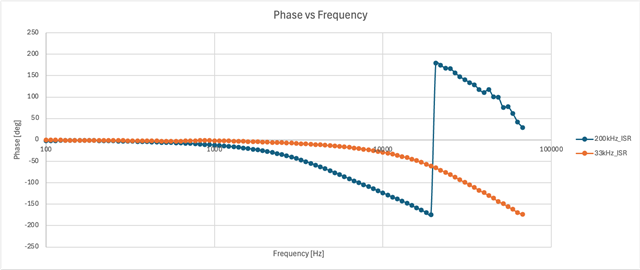
对于 33kHz、相位滚降似乎以更高的频率发生、这对我来说非常奇怪。 想知道是否有人可以帮助我了解这个结果。
注意:我修改了工程以使系统在 33kHz 下运行、为了确保正确运行、我在 ISR 中进行了引脚切换并在示波器上捕获了该工程(时间刻度不变,光标通过 CH1 上的引脚切换来指示 ISR 频率。 Ch2 是输出电压)。 请参阅下面的:


期待对 SFRA 工具进行澄清!