请注意,本文内容源自机器翻译,可能存在语法或其它翻译错误,仅供参考。如需获取准确内容,请参阅链接中的英语原文或自行翻译。
器件型号:LAUNCHXL-F28P55X工具/软件:
我将 BoostXL3PhGaN 与 LAUNCHXL-F28P55X 配合使用。 该工程为 dual_axis_servo_drive 、具有 PMSM 电机 KBMS 43 H03 B11 模型
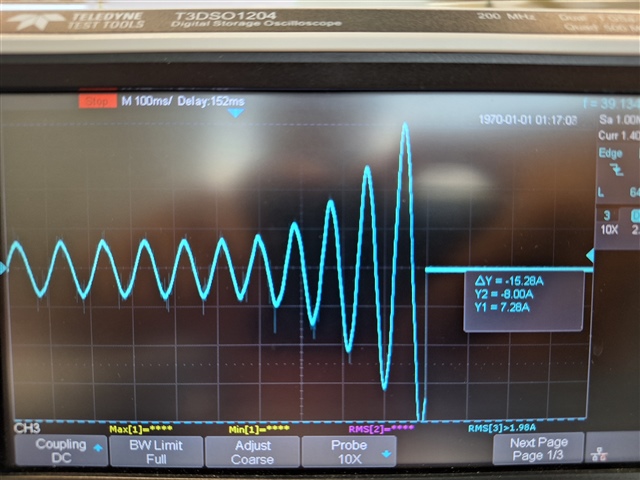
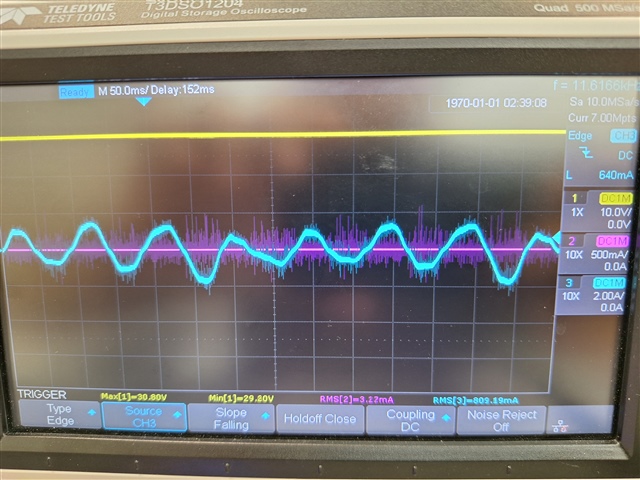
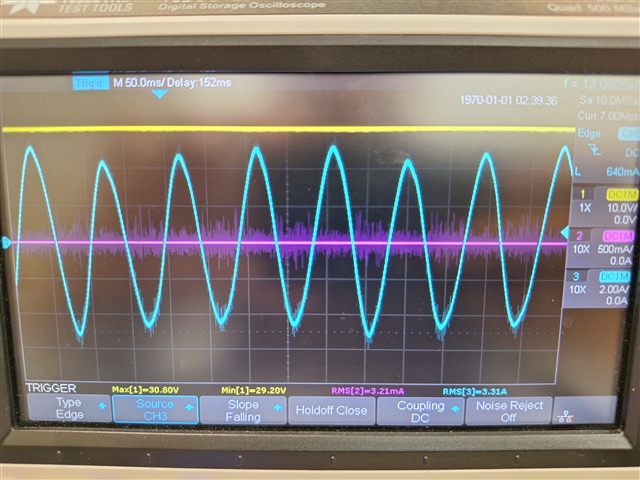
1) 为什么当我增加 IDREF 时 或三角形 相电流的正弦波形(可以在示波器上看到)会变得更明显(更好)
2) 为什么当我增加 IDREF 时 趋势 相电流的幅值(显示在示波器上)变得高得多?
3) 对于 PMSM 是否正确、我应该让 IdRef = 0?
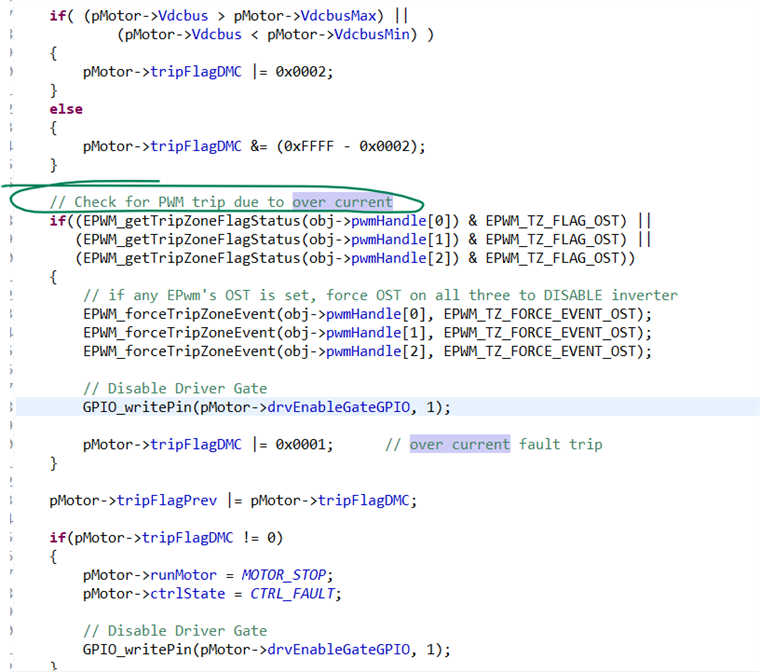
4) 此过流是指直流母线上或电机相位上的电流过大?